9 Motion Control Functions
9-76
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
Actual positions can be monitored in the MC Function Module software. This function is separate from
the hardware-based limit input signals. Set the range to monitor by setting the software limits in the
Positive Software Limit and Negative Software Limit axis parameters. During normal positioning, motion
is possible within the range of these software limits. Set software limits to prevent potential damage to
machinery caused by mistakes in the user program or improper operation.
Axis Parameters That Are Related to Software Limits
*1 If the actual position goes beyond a software limit during execution of a movement instruction that has a Decel-
eration input variable, the axis decelerates to a stop at the deceleration rate given by Deceleration. If the actual
position goes beyond a software limit during execution of a movement instruction that does not have a Decel-
eration input variable, the axis decelerates to a stop at the maximum deceleration that is set in the axis param-
eters.
*2 Positions can be set within a 40-bit signed integer range when converted to pulses.
You can use the axis settings of the Sysmac Studio, the MC_Write (Write MC Setting) instruction, or
the MC_WriteAxisParameter (Write Axis Parameters) instruction to set the above axis parameters.
If any setting values are changed for an axis or axes group in operation, those settings are enabled
when the next operation begins.
Software limits function in the following two cases based on the axis operation state and the motion
control instruction that is used.
Executing Motion Instructions
• When the Actual Position Is within the Software Limits
An instruction error will occur if the target position is outside the software limit range.
9-8-5 Software Limits
Parameter name Function Setting range Default
Software Limits Select the software limit function.
0: Disabled
1: Deceleration stop for command position
*1
2: Immediate stop for command position
3: Deceleration stop for actual position
*1
4: Immediate stop for actual position
0 to 4 0: Disabled
Positive Software
Limit
Set the software limit in the positive direction.
The unit is command units.
Long reals
*2
2,147,483,647
Negative Software
Limit
Set the software limit in the negative direction.
The unit is command units.
−2,147,483,648
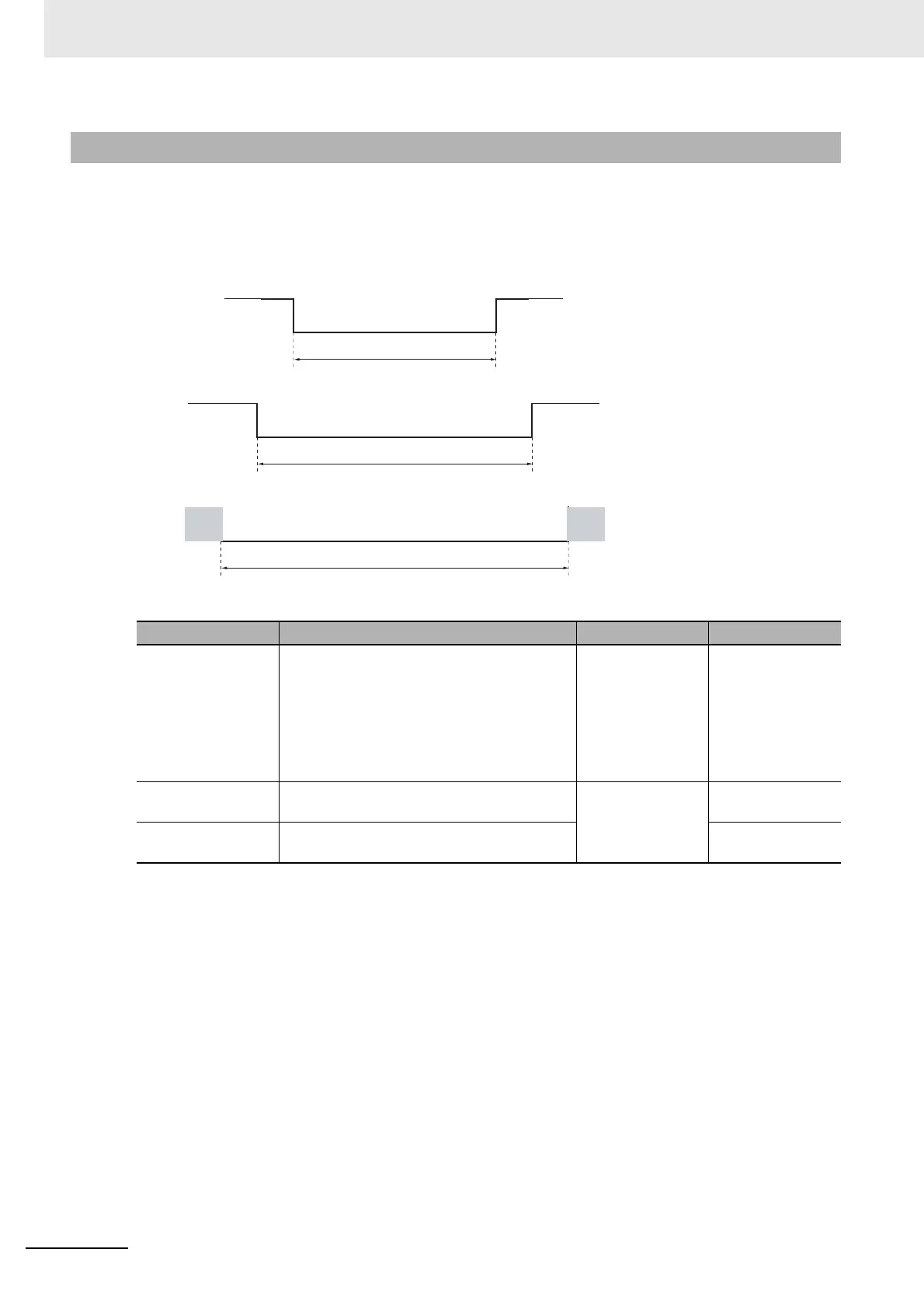
Mechanical stopper
Positive limit input signal
Positive software limit
Mechanical range of motion
Electrical range of motion
Software range of motion
Mechanical stopper
Negative limit input signal
Negative software limit

 Loading...
Loading...







