6-17
6 Motion Control Programming
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
6-4 Execution and Status of Motion Control Instructions
6
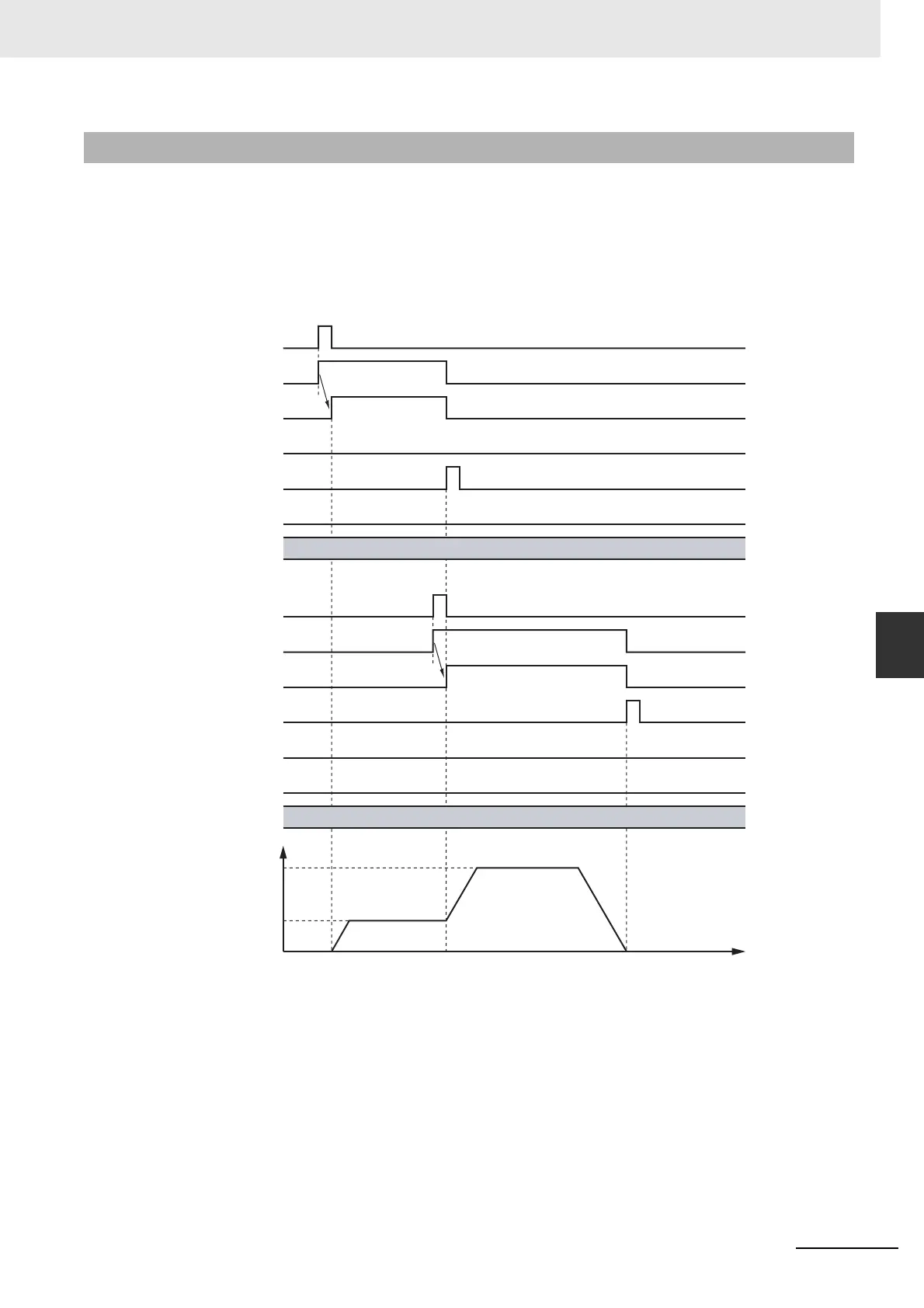
6-4-4 Timing Chart for Multi-execution of Motion Control Instructions
Another instance can be executed for an axis during axis motion. Set the input variable BufferMode to
specify when to start operation.
The following figure shows an example in which BufferMode (Buffer Mode Selection) is set to aborting
when MC_MoveAbsolute (Absolute Positioning) instructions are executed with multi-execution of
instructions.
“FB1” and “FB2” in the following figure are the instance names of the instructions.
For details on multi-execution of instructions for the MC Function Module, refer to 9-5-7 Multi-execution
of Motion Control Instructions (Buffer Mode) and 9-7-5 Multi-execution (Buffer Mode) of Motion Control
Instructions for Multi-axes Coordinated Control.
6-4-4 Timing Chart for Multi-execution of Motion Control Instructions
Busy
Done
CommandAborted
Active
Error
16#0000
ErrorID
Execute
Busy
Done
CommandAborted
Active
Error
16#0000
ErrorID
Execute
FB1
FB2
FB2 travel
distance
FB1 travel
distance
FB1 target velocity
FB2 target velocity
Velocity
Time

 Loading...
Loading...







