5 Motion Control Parameters
5-28
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
*2 If you use an OMRON GX-series EtherCAT Slave Encoder Input Terminal, the maximum value of the ring
counter (index 0x4003) of the Encoder Input Terminal must agree with the Modulo Maximum Position Setting
Value. The modulo minimum position setting value must be set to 0.
*3 A CPU Unit with unit version 1.10 or later and Sysmac Studio version 1.12 or higher are required to use this
parameter.
*4 If you set this parameter to 1, the Servo Ready (Switched on) status of OMRON G5-series Servo Drives can-
not be used. To use the Servo Ready (Switched on) status, set this parameter to 0. Refer to A-5 PDS State
Transition for details on the PDS state transition.
Set the motor operation to use to determine home.
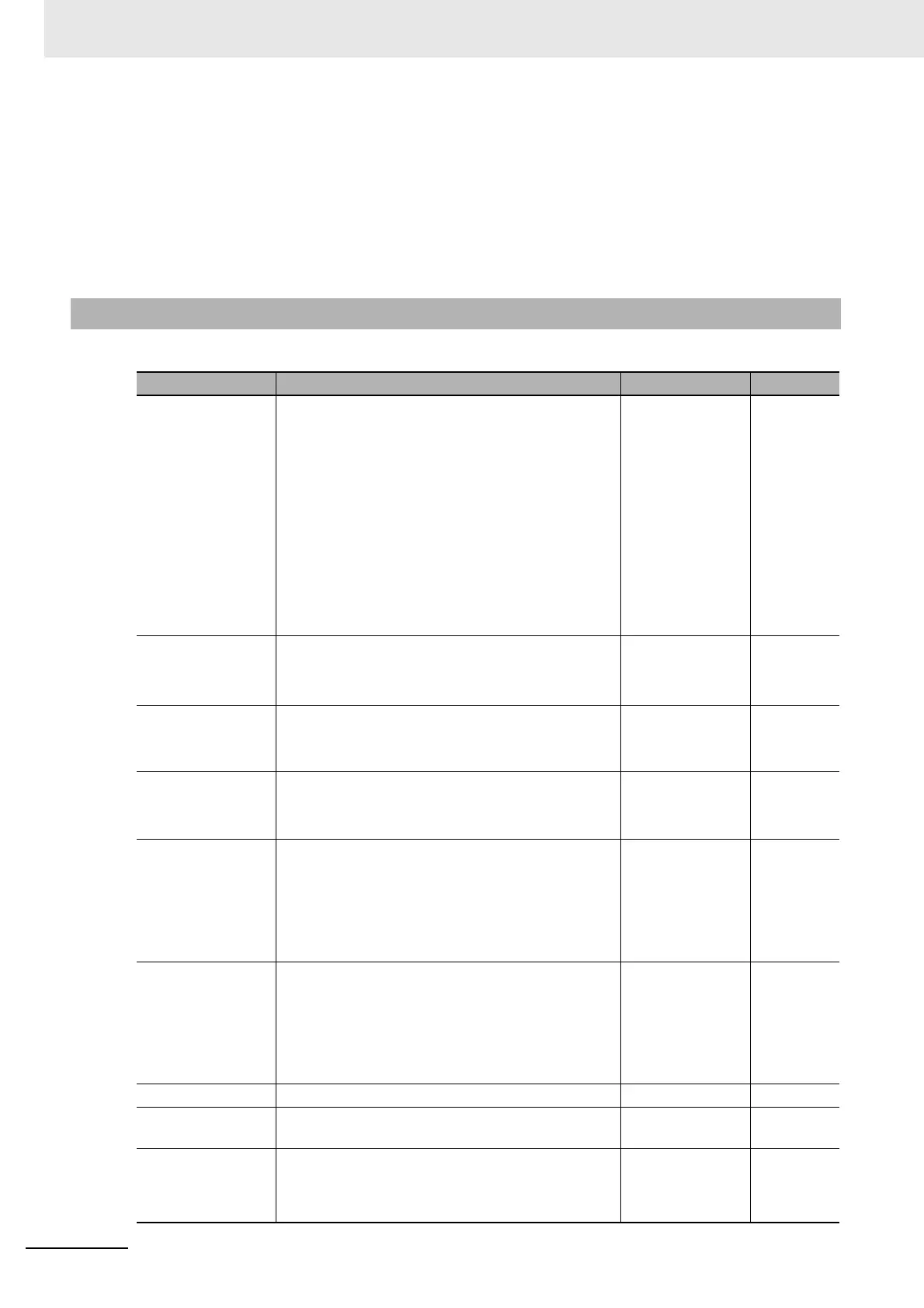
5-2-9 Homing Settings
Parameter name Function Setting range Default
Homing Method
*1*2
Set the homing operation.
0: Proximity reverse turn/home proximity input OFF
1: Proximity reverse turn/home proximity input ON
4: Home proximity input OFF
5: Home proximity input ON
8: Limit input OFF
9: Proximity reverse turn/home input mask distance
11: Limit inputs only
12: Proximity reverse turn/holding time
13: No home proximity input/holding home input
14: Zero position preset
0, 1, 4, 5, 8, 9, or
11 to 14
14
Home Input Signal Select the input to use for the home input signal.
0: Use Z-phase input as home
1: Use external home input
*3
0 or 1 0
Homing Start Direc-
tion
Set the start direction for when homing is started.
0: Positive direction
2: Negative direction
0 or 2 0
Home Input Detec-
tion Direction
Set the home input detection direction for homing.
0: Positive direction
2: Negative direction
0 or 2 0
Operation Selection
at Positive Limit
Input
Set the stopping method when the positive limit input
turns ON during homing.
0: No reverse turn/minor fault stop (Stop according to
Limit Input Stop Method parameter.)
1: Reverse turn/immediate stop
2: Reverse turn/deceleration stop
0 to 2 1
Operation Selection
at Negative Limit
Input
Set the stopping method when the negative limit input
turns ON during homing.
0: No reverse turn/minor fault stop (Stop according to
Limit Input Stop Method parameter.)
1: Reverse turn/immediate stop
2: Reverse turn/deceleration stop
0 to 2 1
Homing Velocity Set the homing velocity. (Unit: command units/s) Positive long reals 10,000
Homing Approach
Velocity
Set the velocity to use after the home proximity input
turns ON. (Unit: command units/s)
Positive long reals 1,000
Homing Accelera-
tion
Set the acceleration rate for homing. If the homing
acceleration is set to 0, the homing velocity or other
target velocity is used without any acceleration. (Unit:
command units/s
2
)
Non-negative long
reals
0

 Loading...
Loading...







