7-3
7 Manual Operation
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
7-2 Turning ON the Servo
7
7-2-1 Turning ON the Servo
7-2 Turning ON the Servo
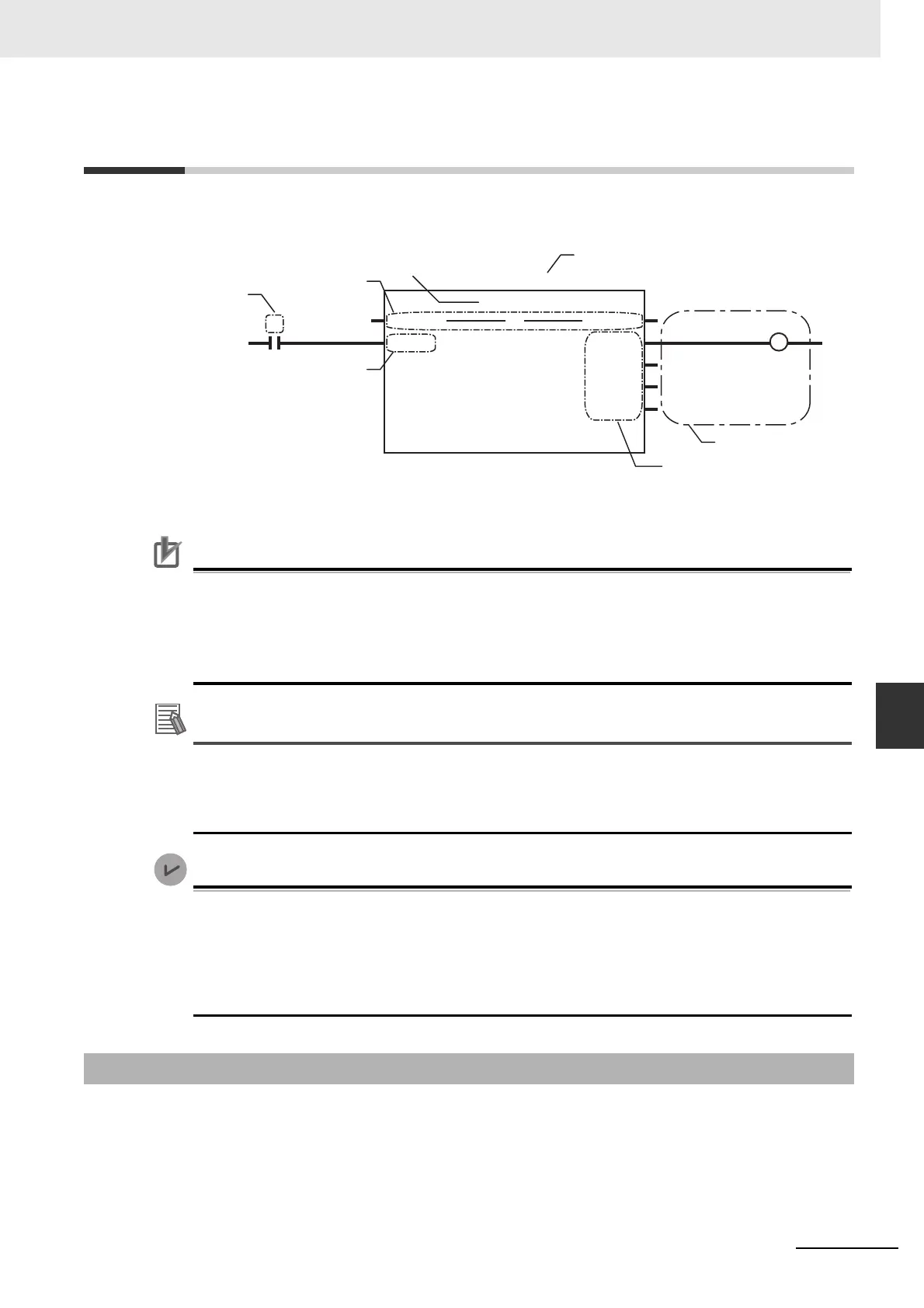
You can turn the Servo ON or OFF to enable or disable sending operation commands to the Servo
Drive. The MC_Power (Power Servo) motion control instruction is used.
Specify the axis to move with the Axis in-out variable. Change the Enable input variable for MC_Power
to TRUE to turn ON the Servo. Change Enable to FALSE to turn OFF the Servo.
Precautions for Correct UsePrecautions for Correct Use
• If you change Enable to FALSE while the axis is moving, the command stops immediately and
all motion control instructions for that axis are disabled.
• If you use an NX-series Pulse Output Unit, you must provide a separate means to turn the
power supply to the motor drive ON and OFF. Refer to the NX-series Position Interface Units
User’s Manual (Cat. No. W524) for details.
If an OMRON 1S-series Servomotor or G5-series Servomotor with an absolute encoder is used,
or if an OMRON G5-series Linear Motor Type Servomotor/Servo Drive with built-in EtherCAT
communications is used with an absolute external scale, home is defined when the Enable input
variable to the MC_Power instruction changes to TRUE.
For a CPU Unit with unit version 1.10 or later, if an OMRON 1S-series Servomotor or G5-series
Servomotor with an absolute encoder is used, or if an OMRON G5-series Linear Motor Type
Servomotor/Servo Drive with built-in EtherCAT communications is used with an absolute exter-
nal scale, home is also defined when EtherCAT process data communications change from a
non-established to an established state, in addition to the step shown in the above Additional
Information.
1
Adding and Setting an Axis
Add and set an axis from the Sysmac Studio. For details, refer to 3-2-2 Setting Procedure.
2
Setting Axis Parameters
7-2-1 Turning ON the Servo
Output variables
Output parameter
Instance name
Body name
Input variable
In-out variable
Input parameter
Enable Status
ErrorID
MC_Power_instance
Error
MC_Power
Axis Axis
Busy
Status1
Axis1
A
Error1
ErrorID1
Busy1

 Loading...
Loading...







