9 Motion Control Functions
9-42
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
This section describes how to modify input variables of the same instance of a motion control instruc-
tion during operation of a single axis and re-execute that instruction. The input variables Position (Tar-
get Position), Distance (Travel Distance), Velocity (Target Velocity), Acceleration (Acceleration Rate),
Deceleration (Deceleration Rate), and Tor que (Target Torque) and sometimes other input variables can
be changed by re-execution. An instruction error will occur if you change an input variable that cannot
be changed and attempt to re-execute the instruction. If you re-execute an instruction that has been
buffered due to multi-execution of instructions, the input variables for the instruction in the buffer will
change.
For details on input variables that can be changed, refer to the NJ/NX-series Motion Control Instruc-
tions Reference Manual (Cat. No. W508).
If you change the target position with re-execution, the operation may change depending on the timing
of the change and the new target position. If the direction of motion reverses due to a change in the tar-
get position, you can choose to decelerate to a stop after a reverse turn or stop immediately after
reversing with the Operation selection at Reversing axis parameter.
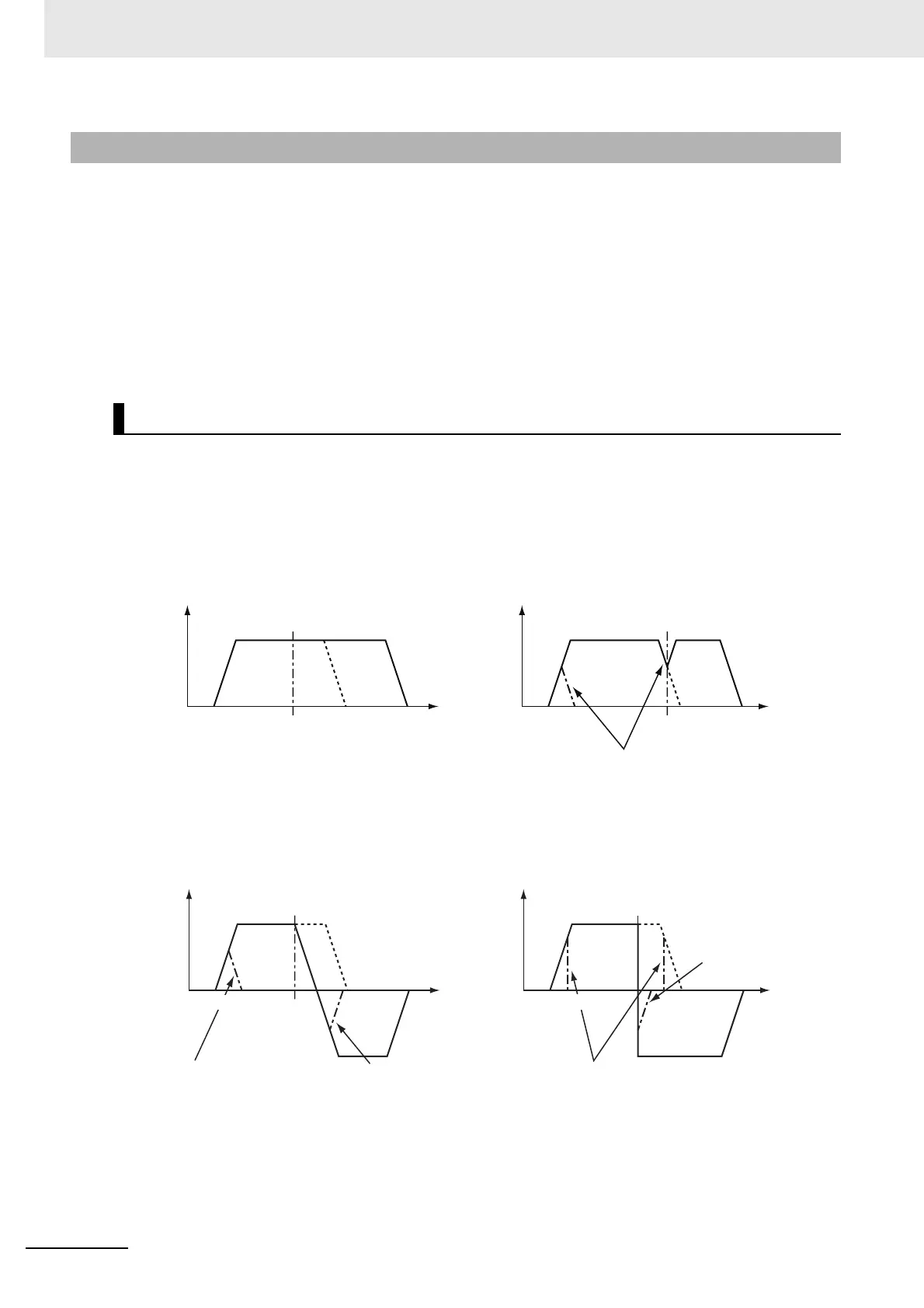
When a Reverse Turn Does Not Occur for the New Command Value
When a Reverse Turn Occurs for the New Command Value
9-5-6 Re-executing Motion Control Instructions
Changing the Target Position
If you re-execute an instruction during triangular
control or during deceleration, acceleration to
the target velocity will occur again. In some
cases, the axis will not reach the target velocity.
↑Executed.
↓
Command re-executed.
Velocity
Re-executing Instruction during
Acceleration/deceleration
↑Initial
command
position
↑New
command
position
↑Initial
command
position
↑New
command
position
↓
Command re-executed.
↑Executed.
Velocity
Re-executing Instruction during
Constant-velocity Motion
↑New command
position
↑Initial
command
position
If the travel distance upon
reverse turn is small,
triangular control is
performed as it was for
the first execution of the
instruction.
↓Command re-executed.
↑Executed.
Velocity
Stopping Immediately after Reverse Turn
↑New command
position
↓Initial command position
↓Command re-executed.
If the instruction is re-executed during
acceleration or deceleration, the axis
stops immediately upon re-execution.
This also occurs during deceleration.
If the travel distance upon reversal
is small, triangular control is
performed as it was for the first
execution of the instruction.
If the instruction is re-executed
during acceleration, the axis
starts deceleration as soon as
the instruction is re-executed.
↑Executed.
Velocity
Decelerating to a Stop after Reverse Turn