5-31
5 Motion Control Parameters
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
5-2 Axis Parameters
5
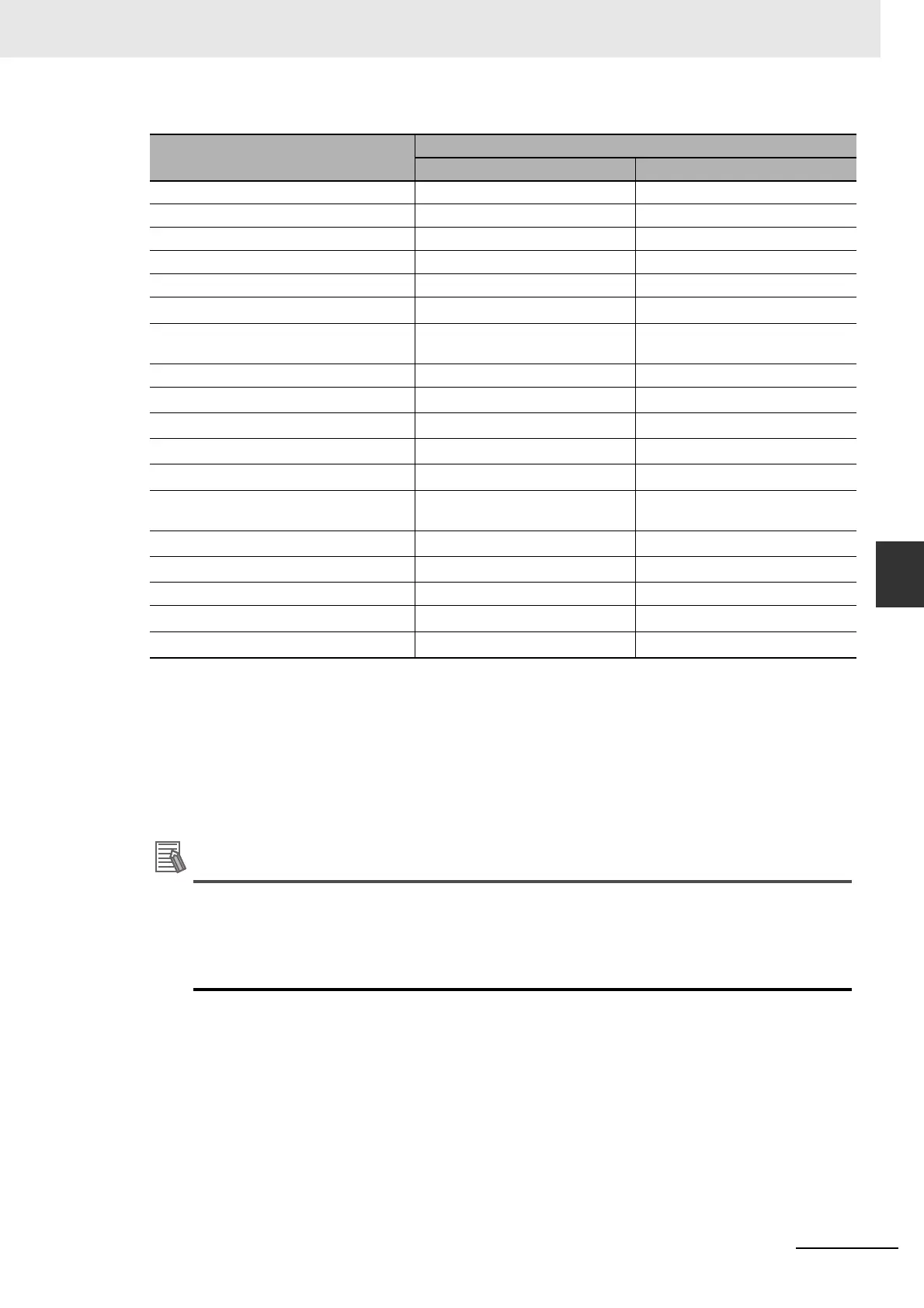
5-2-10 Axis Parameter Setting Example
*1 The position command unit will be 1 μm.
*2 The maximum velocity will be 3,000 r/min = 30 m/min = 0.5 m/s = 500,000 μm/s.
*3 The maximum jog velocity will be 10% of the maximum velocity, i.e., 0.05 m/s = 50,000 μm/s.
*4 The maximum acceleration and the maximum deceleration are 5 m/s
2
. The acceleration time to the maximum
velocity (3,000 r/min) is 0.1 s.
*5 Set a positioning that is within the movable range of the device. The positive software limit is set to 50 cm =
500,000 μm.
*6 The periodic range of the position is 0 to 1 m (1,000,000 μm).
You can select the axis type for the master axis according to the configuration of the device.
There are four axis types: servo axes, virtual servo axes, encoder axes, and virtual encoder
axes. In this example, the axis type of the master axis is an encoder axis. Specify the actual
position for the motion control instruction input variable ReferenceType (Position Type Selec-
tion).
Parameter name
Settings
Axis 1 Axis 2
Axis Variable Name Axis1 Axis2
Axis Number 1 2
Enabled Axes Used axis Used axis
Axis Type Servo axis Encoder axis
Input Device/Output Device 1 2
Unit of Display
μm
*1
μm
*1
Command Pulse Count Per Motor Rota-
tion
1,048,576 1,048,576
Work Travel Distance Per Motor Rotation 10,000 10,000
Maximum Velocity
500,000
*2
---
Maximum Jog Velocity
50,000
*3
---
Maximum Acceleration
5,000,000
*4
---
Maximum Deceleration
5,000,000
*4
---
Software Limits Immediate stop for command
position
Disabled.
Positive Software Limit
500,000
*5
---
Negative Software Limit
0
*5
---
Count Mode Linear Mode Rotary Mode
Modulo Maximum Position ---
1,000,000
*6
Modulo Minimum Position ---
0
*6

 Loading...
Loading...







