tion. It is used in ST programming.
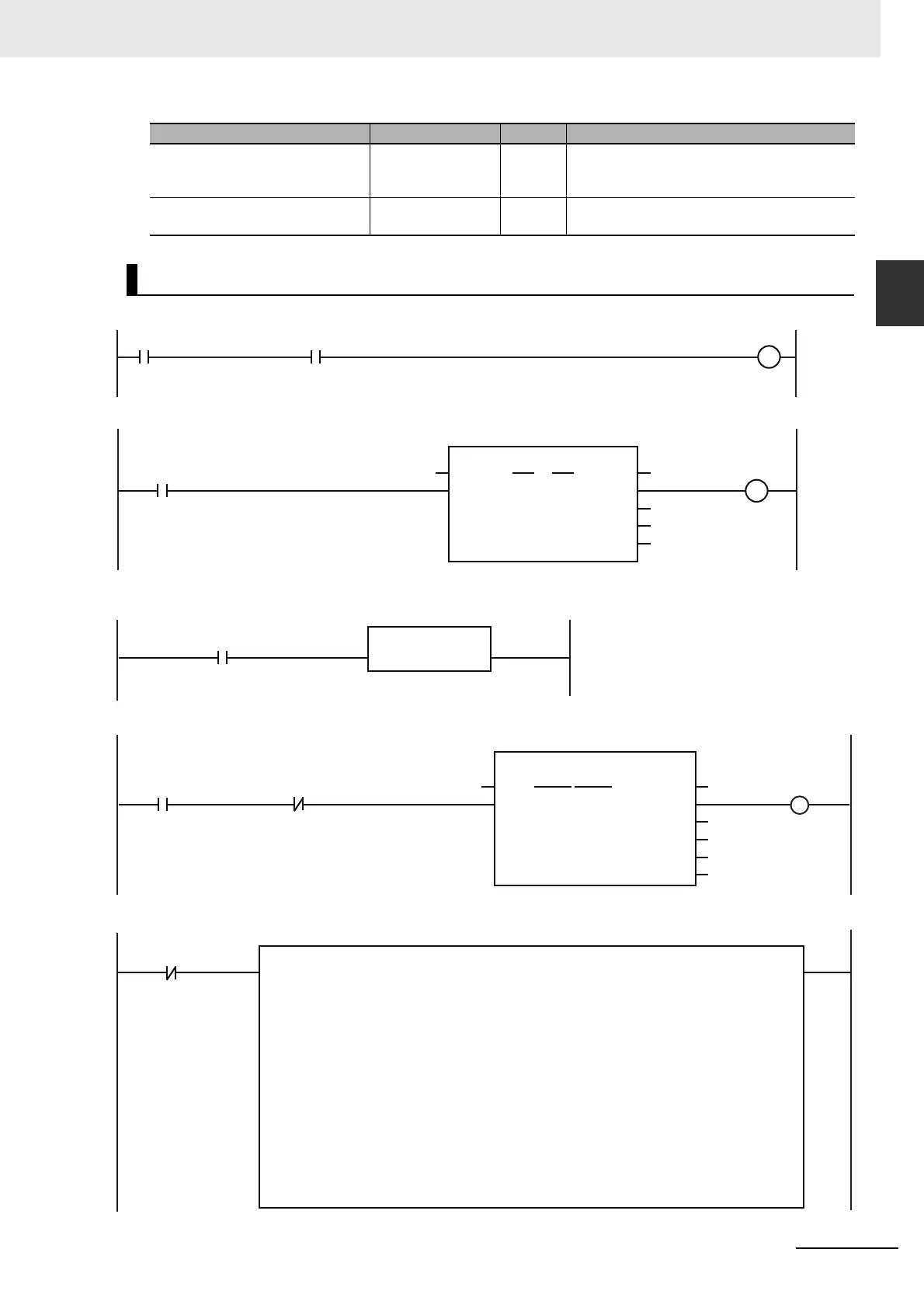
MC_Axis000.MFaultLvl.Active
EN
FaultHandler
FaultHandler
Hm_Bsy
Hm_Ca
Hm_Err
Hm_ErrID
Hm_D
Done
Error
CommandAborted
Axis
Busy
ErrorID
Execute
HM
MC_Home
Axis
MC_Axis000
Pwr_Status MC_Axis000.Details.Homed
InitFlag
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Mv_Feed_TrigRef.Mode := _eMC_TRIGGER_MODE#_mcDrive;
Mv_Feed_TrigRef.LatchID := _eMC_TRIGGER_LATCH_ID#_mcLatch1;
Mv_Feed_TrigRef.InputDrive := _eMC_TRIGGER_INPUT_DRIVE#_mcEncoderMark;
Mv_Feed_TrigVar := FALSE;
Mv_Feed_Pos := LREAL#2000.0;
Mv_Feed_Vel := LREAL#1000.0;
Mv_Feed_Acc := LREAL#10000.0;
Mv_Feed_Dec := LREAL#10000.0;
Mv_Feed_Dir := _eMC_DIRECTION#_mcCurrentDirection;
Mv_Feed_Mm := _eMC_MOVE_MODE#_mcVelocity;
Mv_Feed_FeedDis := LREAL#500.0;
Mv_Feed_FeedVel := LREAL#500.0;
StartPg
Lock0
MC_Axis000.DrvStatus.Ready
PWR
Error
Axis Axis
Enable Status
Busy
MC_Power
ErrorID
Lock0
MC_Axis000
Pwr_Status
Pwr_Bsy
Pwr_Err
Pwr_ErrID
If the Servo Drive for axis 0 is ready, turn ON the Servo for axis 0.
// Parameters for MC_MoveFeed
// The Input Parameter Initialization Completed Flag is changed to TRUE.
InitFlag := TRUE;
If a minor fault level error occurs for axis 0, the error handler for the device (FaultHandler) is executed.
Program the FaultHandler according to the device.
If the Servo is ON for axis 0 and home is not defined, the MC_Home instruction is executed.
The input parameters for interrupt feeding are set.
Check if the Servo Drive for axis 0 is ready when StartPg is TRUE.