6. Function blocks
6.1 Manufacturer function blocks
6.1.4 Open-loop and closed-loop function blocks
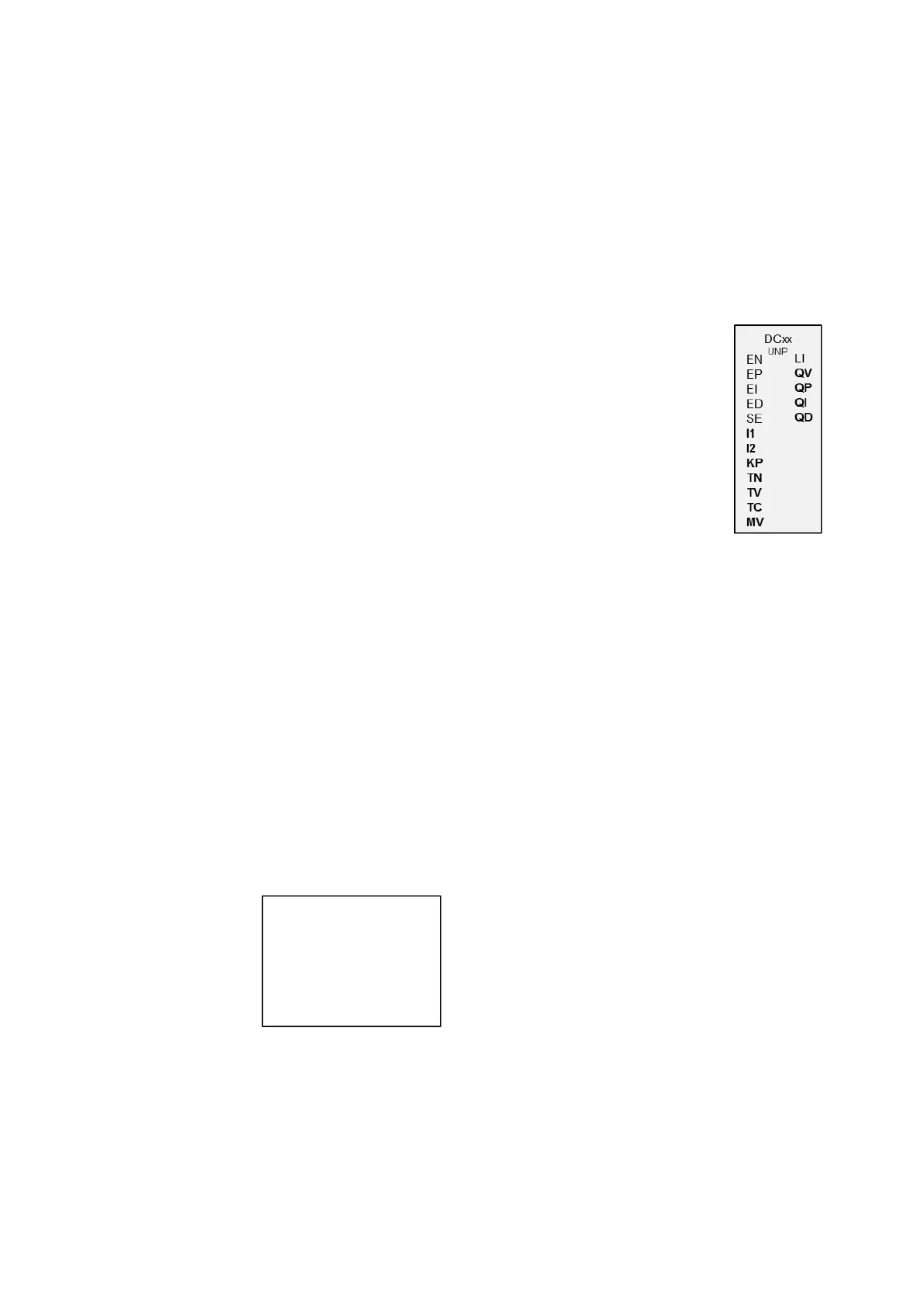
6.1.4.1 DC - PID controller
General
easyE4 base devices provide 32 PID controller function blocks
DC01...DC32.
Operating principle
A closed-loop control circuit with a PID controller consists of the following com-
ponents:
l
Setpoint (reference variable),
l
Actual value (controlled variable),
l
System deviation = (setpoint–actual value),
l
PID controller,
l
Control system (e.g. PTn system),
l
Disturbance variables.
The PID controller operates on the basis of the equation of the PID algorithm. Accord-
ing to this, the manipulated variable Y(t) is the result of the calculation of the pro-
portional component, an integral component and a differential component.
PID controller equation:
Y(t) = YP(t) + YI(t) + YD(t)
Y(t)=
calculated manipulated variable with scan time t
YP(t)=
Value of the proportional component of the manipulated
variable with scan time t
YI(t) =
Value of the integral component of the manipulated vari-
able with scan time t
YD(t)=
Value of the differential component of the manipulated
variable with scan time t
Proportional component
The proportional component YP is the product of the gain (Kp) and the control dif-
ference (e). The control difference is the difference between the setpoint (Xs) and
374
easyE402/24 MN050009ENEaton.com
 Loading...
Loading...






