t
t
t
t
t
t
t
t
t
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
-40 Hz
-60 Hz
-50 Hz
-30 Hz
-20 Hz
-10 Hz
0x2DDD
Preset 6
Preset 5Preset 5Preset 5
Preset 6
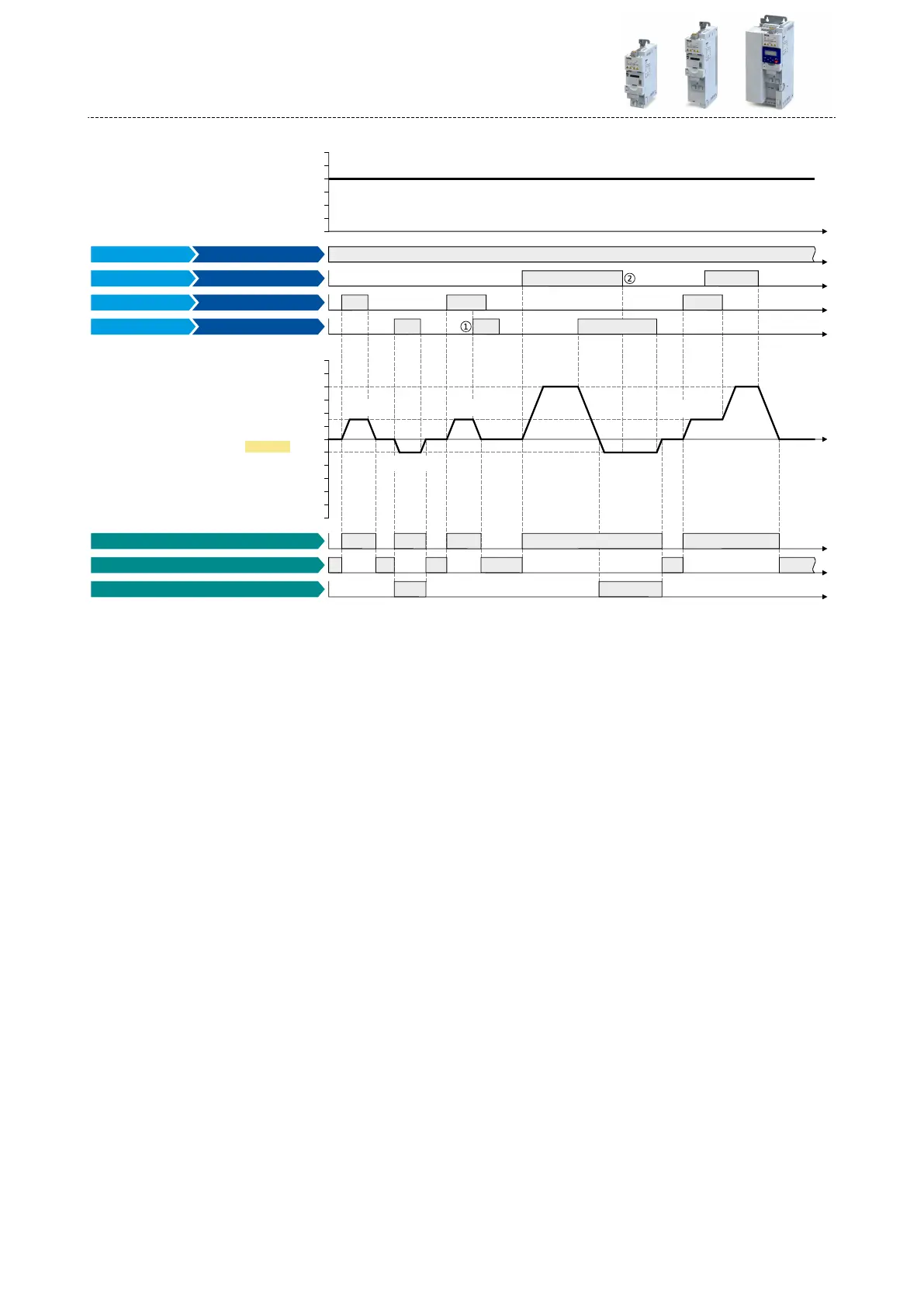
Enable inverter
Digital input 3 [13]
Digital input 2 [12]
Digital input 1 [11]
Constant TRUE [1]
Rotational direction reversed [69]
Running [50]
Stop active [53]
Output signals
Status signals
Output frequency
Jog reverse (CCW)
Jog foward (CW)
Run
Input signals
Frequency setpoint selection
FunctionTrigger
The status signals can be assigned to digital outputs. 4Conguraon of digital outputs^ 603
①
If "Jog foward (CW)" and "Jog reverse (CCW)" are acvated at the same me, the motor is stopped with the stop method set in 0x2838:003
(P203.03) and the jog operaon must be triggered again.
②
The jog operaon cannot be terminated with the "Run" funcon but only by cancelling the jog command.
Flexible I/O conguraon
Start / stop motor
Example 5: Jog forward/Jog reverse
544
 Loading...
Loading...



