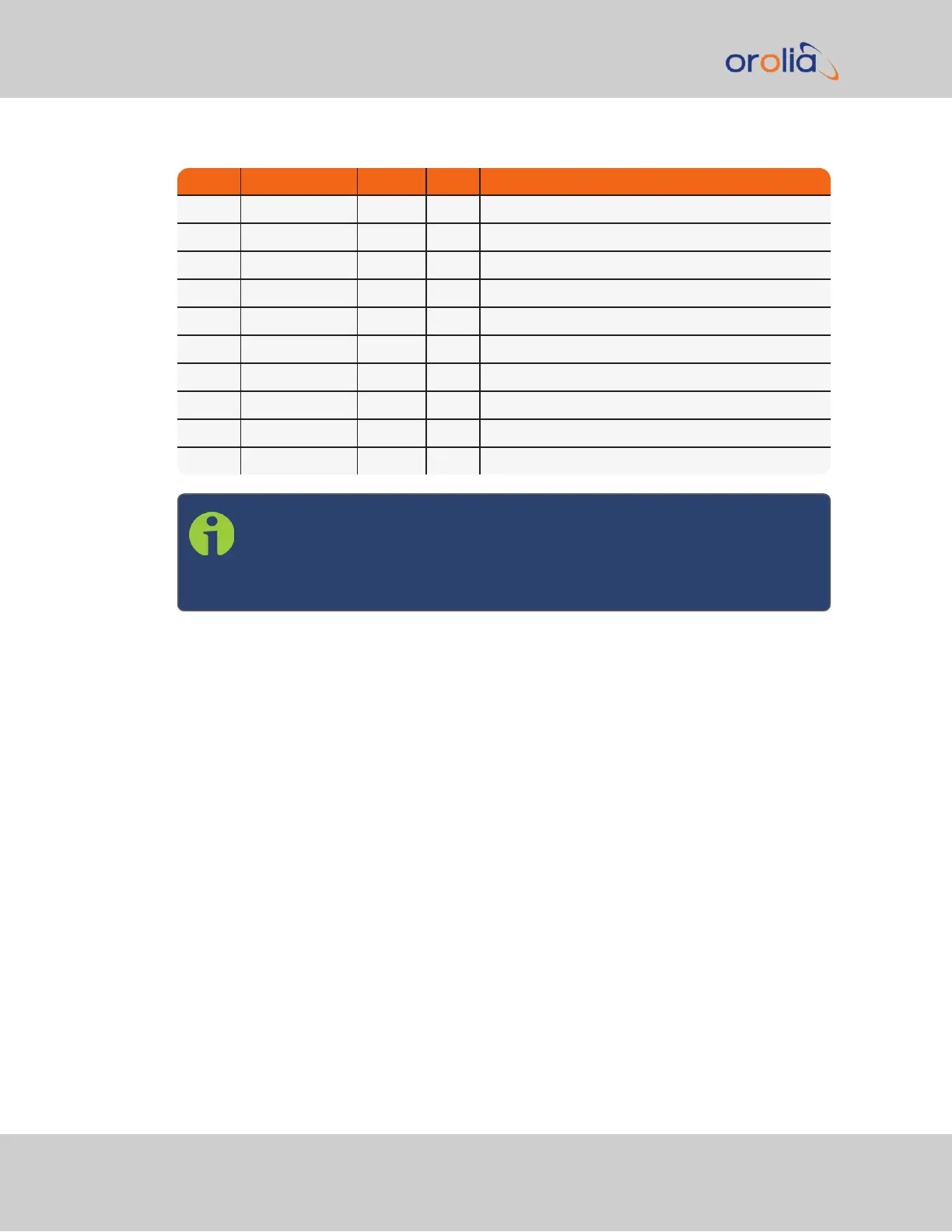
Offset Name Format Unit Description
28 PositionZ double m Estimated position in ECEF. (Z-axis)
36 VelocityX float m/s Estimated velocity in ECEF frame. (X-axis)
40 VelocityY float m/s Estimated velocity in ECEF frame. (Y-axis)
44 VelocityZ float m/s Estimated velocity in ECEF frame. (Z-axis)
48 AccelX float m/s
2
Estimated acceleration in body frame. (X-axis)
52 AccelY float m/s
2
Estimated acceleration in body frame. (Y-axis)
56 AccelZ float m/s
2
Estimated acceleration in body frame. (Z-axis)
60 AngularRateX float rad/s Estimated angular rate in body frame. (X-axis)
64 AngularRateY float rad/s Estimated angular rate in body frame. (Y-axis)
68 AngularRateZ float rad/s Estimated angular rate in body frame. (Z-axis)
Note: You can configure the device to output this register at a fixed rate
using the Async Data Output Type Register in the System subsystem.
Once configured the data in this register will be sent out with the $VNISE
header.
5.3.4.18 VNDTV
Output Type: Delta Theta and Delta Velocity
Register ID: 80
Async Header: DTV
Access: Read
Comment: This register contains the output values of the onboard coning and sculling
algorithm.
Size (Bytes): 28
Example Read Response: $VNRRG, 80, +0.665016, -000.119, -000.409, -000.025,
+000.011, -000.084, -006.702*6A
298 VersaSync User Manual
APPENDIX
 Loading...
Loading...
