Examples
4.3 Acceleration and jerk
Acceleration (B2)
4-4 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
Acceleration profile: SOFT
1: Jerk according to $MA_MAX_AX_JERK[..]
2: Jerk according to $AC_PATHJERK
3: Jerk according to $MA_MAX_AX_JERK[..] (approach block end velocity)
4: Velocity limit due to arc
5: Jerk according to $AC_PATHJERK
4.3 4.3 Acceleration and jerk
Key statement
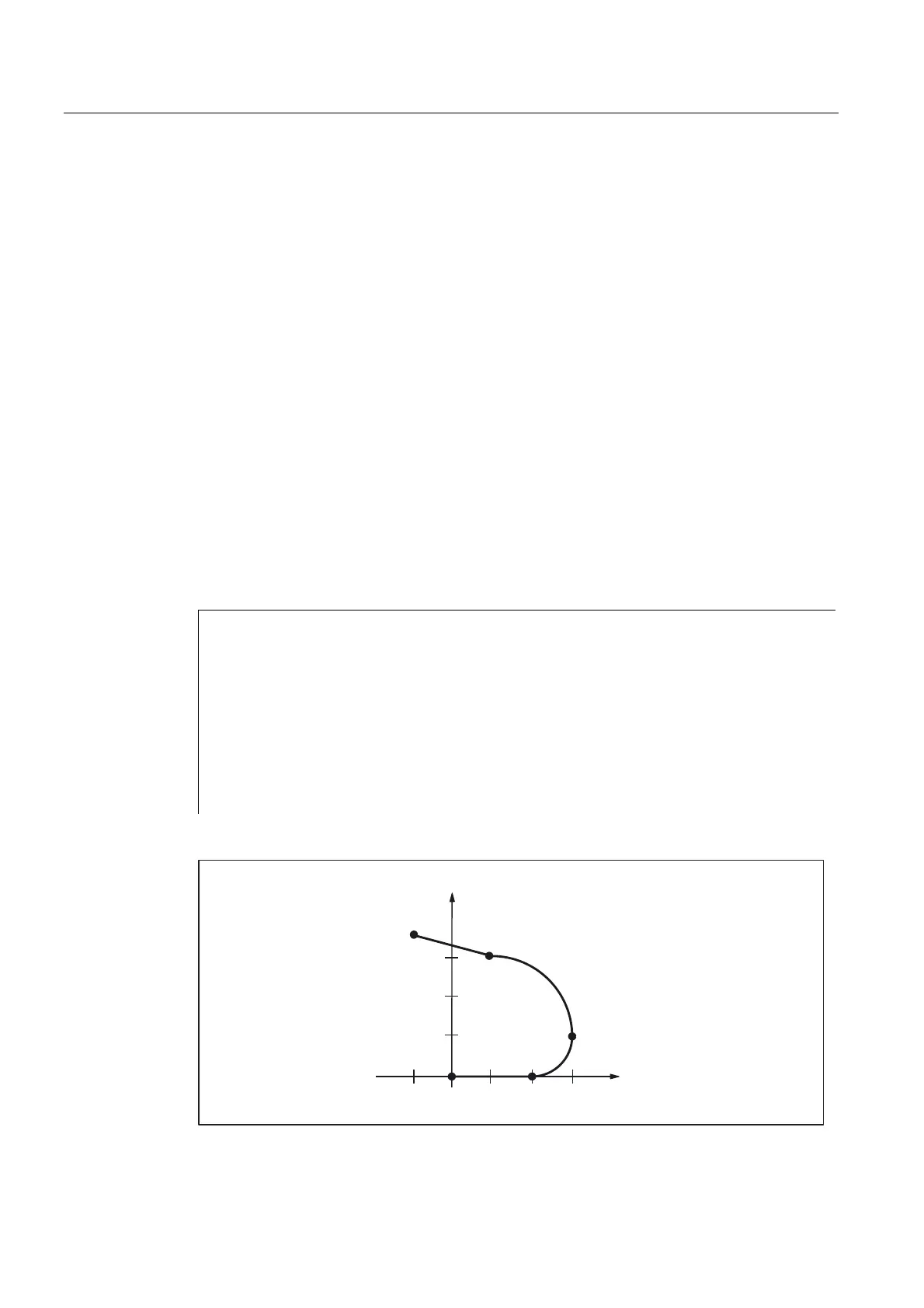
In the following example a short part program is used to illustrate the velocity and
acceleration characteristic for the X-axis. It also shows the connection between specific
velocity and acceleration-related machine data and the contour sections they influence.
Part program
N90 F5000 SOFT G64 ; Continuous-path mode, acceleration with jerk
limitation
N100 G0 X0 Y0 Z0 ; Rapid traverse
N110 G1 X10 ;Straight line
N120 G3 CR=5 X15 Y5 ; Circular arc, radius 5 mm, block transition:
tangential
N130 G3 CR=10 X5 Y15 ; Circular arc, radius 10 mm, block transition:
tangential
N140 G1 X-5 Y17.679 ; straight, 15
o
bend
N200 M30
\
[
1
1
1
1
Fig. 4-3 Part program contour
 Loading...
Loading...















