Detailed Description
2.4 Frames
Axis Types, Coordinate Systems, Frames (K2)
Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
2-65
The fine component is transferred on saving the programmable frame in a local frame
variable (LUD or GUD) and on rewriting.
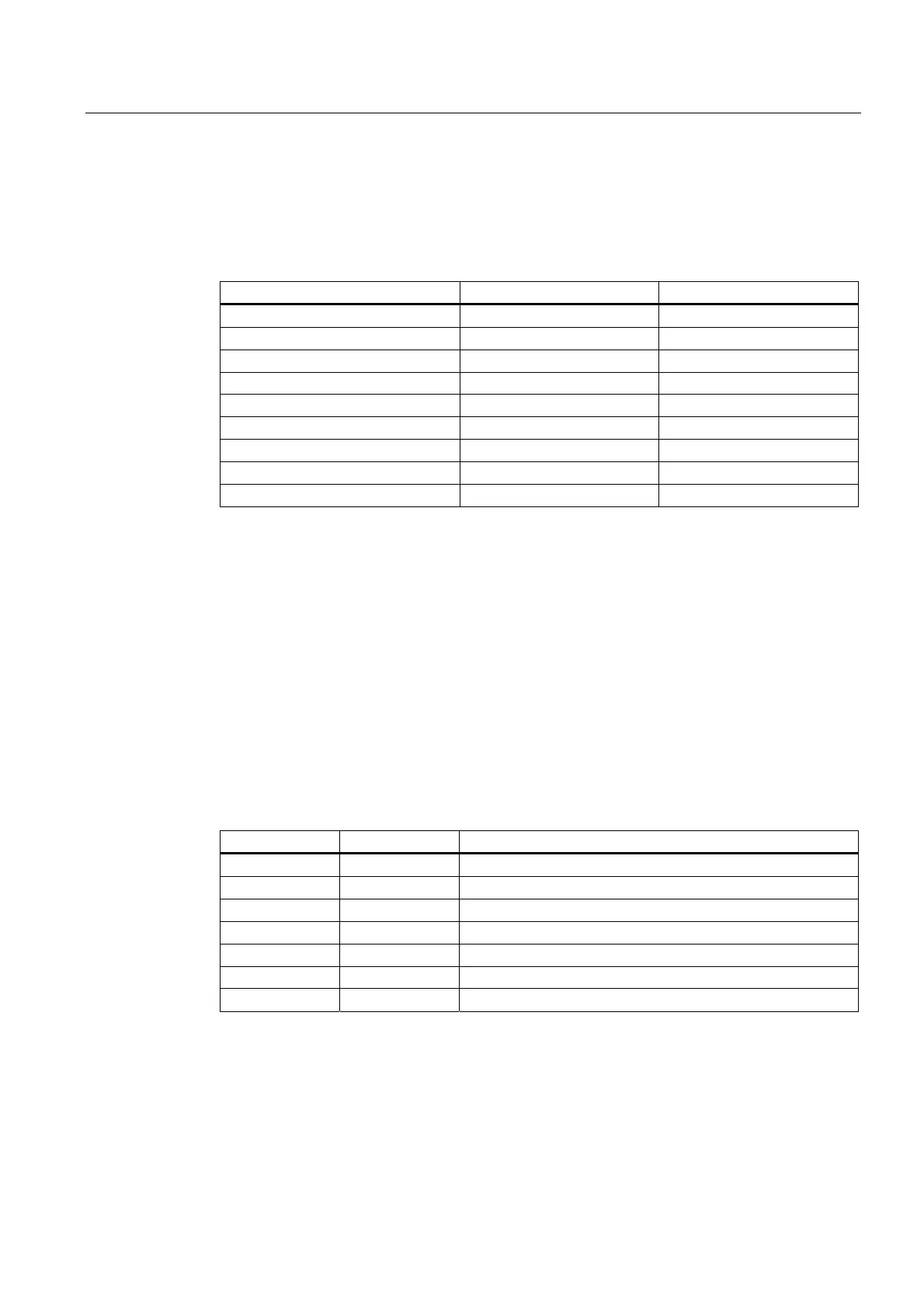
The table below shows the effect of various program commands on the absolute and
additive translation.
Coarse or absolute translation Fine or additive translation
TRANS X10
10 0
ATRANS X10
Unchanged alt_fine + 10
CTRANS(X,10)
10 0
CTRANS()
0 0
CFINE(X,10)
0 10
$P_PFRAME[X,TR] = 10
10 Unchanged
$P_PFRAME[X,FI] = 10
Unchanged 10
G58 X10
10 Unchanged
G59 X10
Unchanged 10
2.4.6.7 Channel-specific system frames
Functionality
System frames are only described by system functions, such as PRESET, scratching, zero
offset external and oblique processing. There are up to seven system frames per channel.
The valid system frames in the channel can be defined using machine data
MD28082 $MC_MM_SYSTEM_FRAME_MASK.
Only system frames required for system functions should be configured, in the interests of
memory space. Per channel, each system frame occupies approx. 1 KB SRAM und approx.
6 KB DRAM. The system frame for PRESET and scratching and the system frame for cycles
are the default. Channel-specific system frames are configured as bit codes, in accordance
with the table below:
Bit Default System frame
0 1 PRESET and scratching
1 0 Zero offset external via system frames
2 0 TCARR and PAROT with an orientational toolholder
3 0 TOROT and TOFRAME
4 0 Frame for workpiece reference points
5 1 Frame for cycles
6 0 Frame for selection and deselection of transformations
Example:
$MC_MM_SYSTEM_FRAME_MASK = 'B001101' means that
there are three system frames; one for PRESET, one for PAROT and one for TOROT and
TOFRAME.
 Loading...
Loading...















