EtherCAT Programming Guide Master Initialization
March, 2017 6-11
6
6.8 _ECAT_Master_Get_DC_Status
Syntax
U16 PASCAL _ECAT_Master_Get_DC_Status (U16 CardNo, U32 *State, I32 *Time, I32
*OffsetTime)
Purpose
This is for acquiring the motion card's DC status, time and time offset.
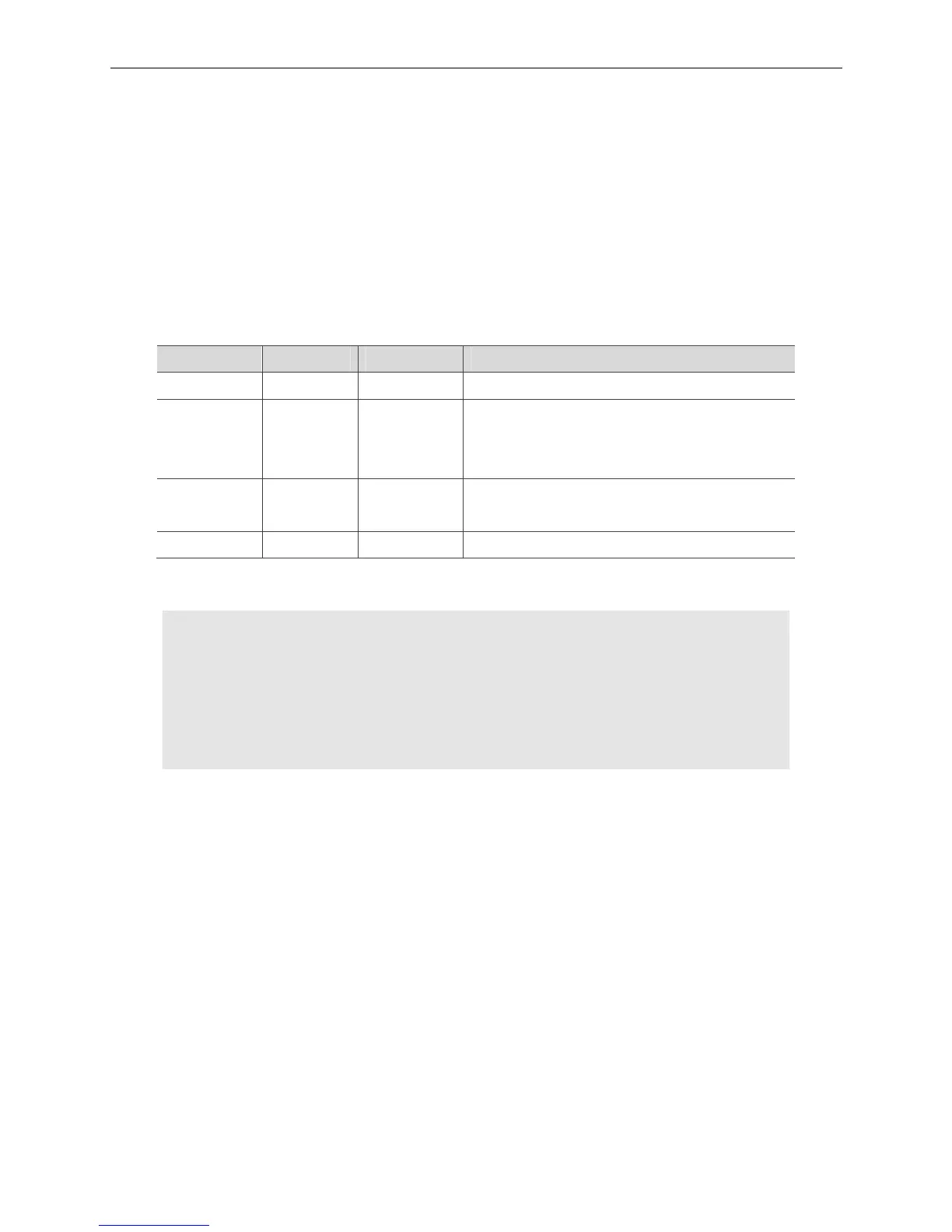
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
State U32* Status
DC current status.
0: Synchronizing
1: Initial synchronization completed
Time I32* Time (us)
The current synchronized DC time (it is about half of
the cycle time when system is stabilized)
OffsetTime I32* Time (us) The offset time of DC time clock
Example
U16 Status;
U16 CardNo=16;
U32 Status;
I32 Time, OffsetTime;
Status = _ECAT_Master_Get_DC_Status(CardNo, &State, &Time, &OffsetTime);