EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017 9-29
9
9.16 _ECAT_Slave_CSP_Feedrate_Overwrite
Syntax
U16 PASCAL _ECAT_Slave_CSP_Feedrate_Overwrite (U16 CardNo, U16 AxisNo,
U16 SlotNo, U16 Mode, I32 NewSpeed, F64 Tsec)
Purpose
This is used for the advanced setting of speed change for single axis. Multiple modes are
provided.
Note: To change to the default speed after it is in mode 1 or mode 2, users have to set it to mode 0 again to
and set NewSpeed to avoid sudden inintended acceleration.
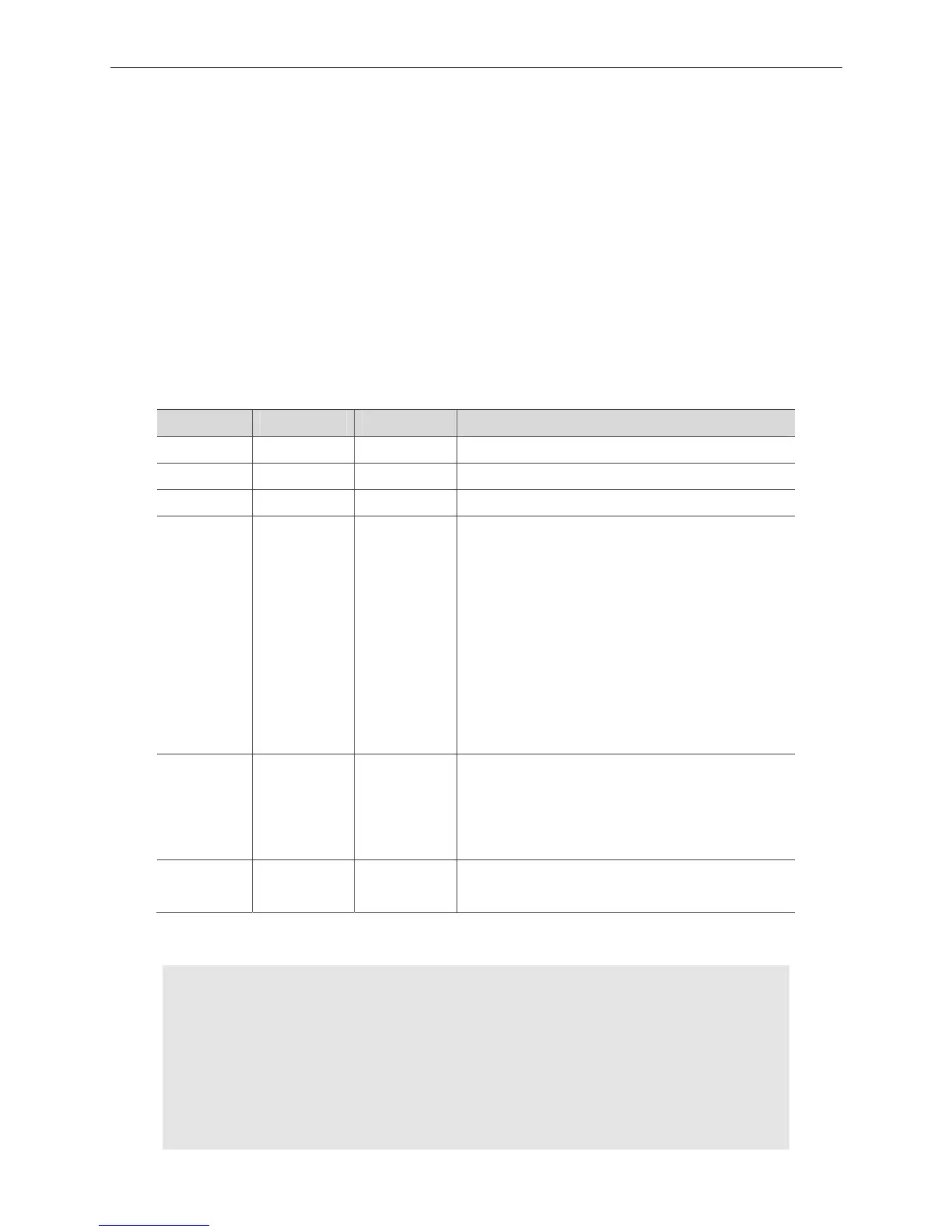
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
Mode U16 Option
0: Change the vector velocity when the current motion
is at constant speed.
1: The current speed and the speed in the later
commands will be changed once the new speed is
set.
2: The current speed and the speed in the later
commands will be changed by the speed ratio once
the new speed is set. The range is from 0% ~
1000%.
NewSpeed I32 Pulse / second
When Mode is set to 0 and 1, input the speed to be
replaced.
When Mode is set to 2, input the speed rator to be
replaced, range from 0% ~ 1000.
Tsec F64 Second
The specified acceleration/deceleration time for speed
changing.
Example
U16 Status;
U16 CardNo=16, AxisNo=1, SlotNo=0, Mode=0;
I32 NewSpeed =3000;
F64 Tsec=0.1;
Status = _ECAT_Slave_CSP_Feedrate_Overwrite (CardNo, AxisNo, SlotNo, Mode,
NewSpeed, Tsec);