EtherCAT Programming Guide General Operation of Motion Axis
March, 2017 8-11
8
8.9 _ECAT_Slave_Motion_Get_MoveMode
Syntax
U16 PASCAL _ECAT_Slave_Motion_Get_MoveMode (U16 CardNo , U16 AxisNo , U16 SlotNo,
U8 *Mode)
Purpose
This is for acquiring the information of current motion mode.
Parameter
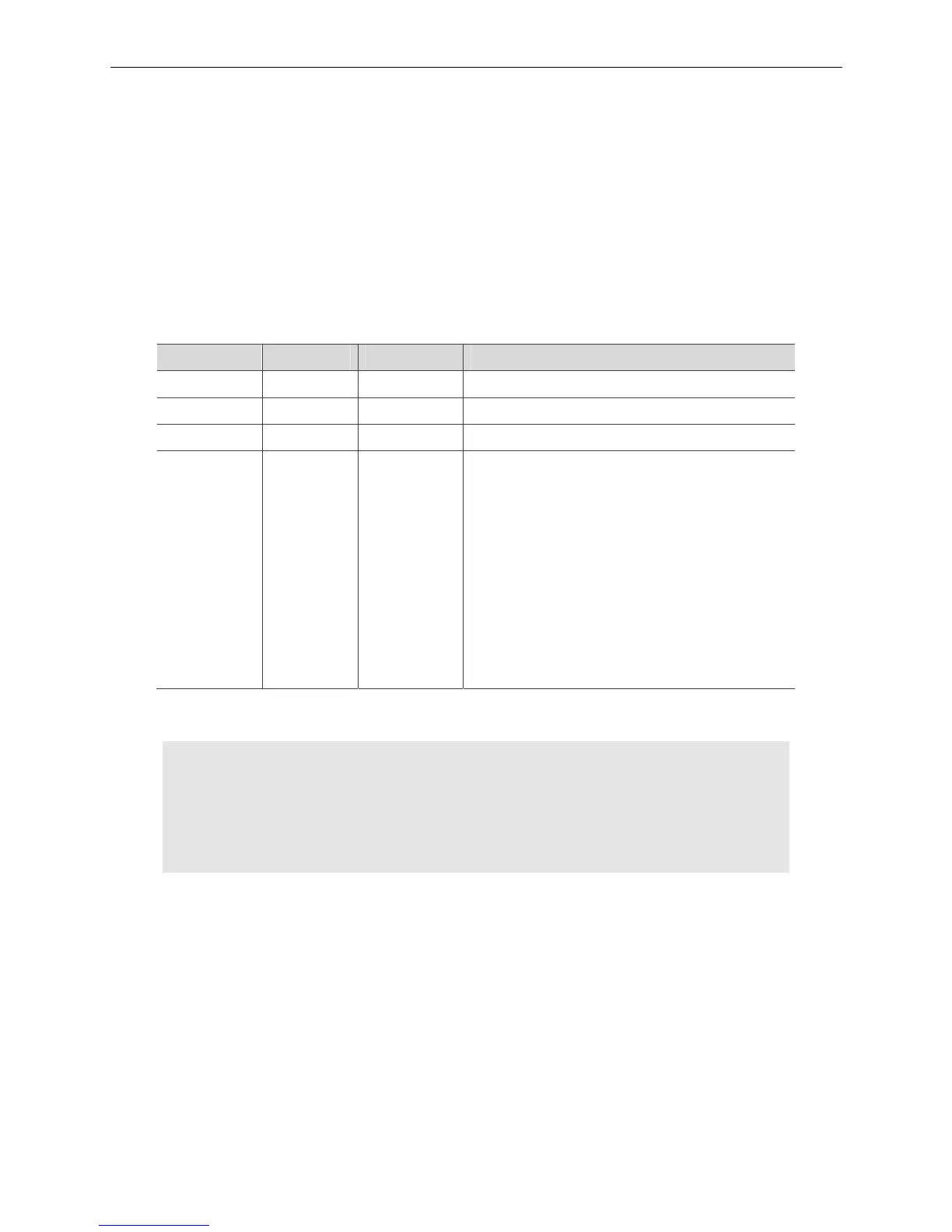
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
Mode U8* Mode
1: Profile Position (PP) mode
2: Velocity mode
3: Profile Velocity (PV) mode
4: Profile Torque (PT) mode
6: Home mode
7: Interpolated Position (IP) mode
8: Cyclic Synchronous Position (CSP) mode
9: Cyclic Synchronous Velocity (CSV) mode
10: Cyclic Synchronous Torque (CST) mode
Example
U16 Status;
U16 CardNo=16,AxisNo=1,SlotNo=0;
U8 Mode;
Status = _ECAT_Slave_Motion_Get_MoveMode (CardNo, AxisNo, SlotNo, &Mode);