9.37 _ECAT_Slave_CSP_Pitch_Set_Enable
Syntax
U16 PASCAL _ECAT_Slave_CSP_Pitch_Set_Enable(U16 CardNo, U16 AxisNo ,
U16 SlotNo, U16 Enable)
Purpose
This is for enabling the pitch error compensation.
EtherCAT master will carry out the compensation in accordance with the interval set by
_ECAT_Slave_CSP_Pitch_Set_Interval (section 9.32) and the relative position set by
_ECAT_Slave_CSP_Pitch_Set_Rel_Table (section 9.35) or the absolute position set by
_ECAT_Slave_CSP_Pitch_Set_Abs_Table (section 9.36).
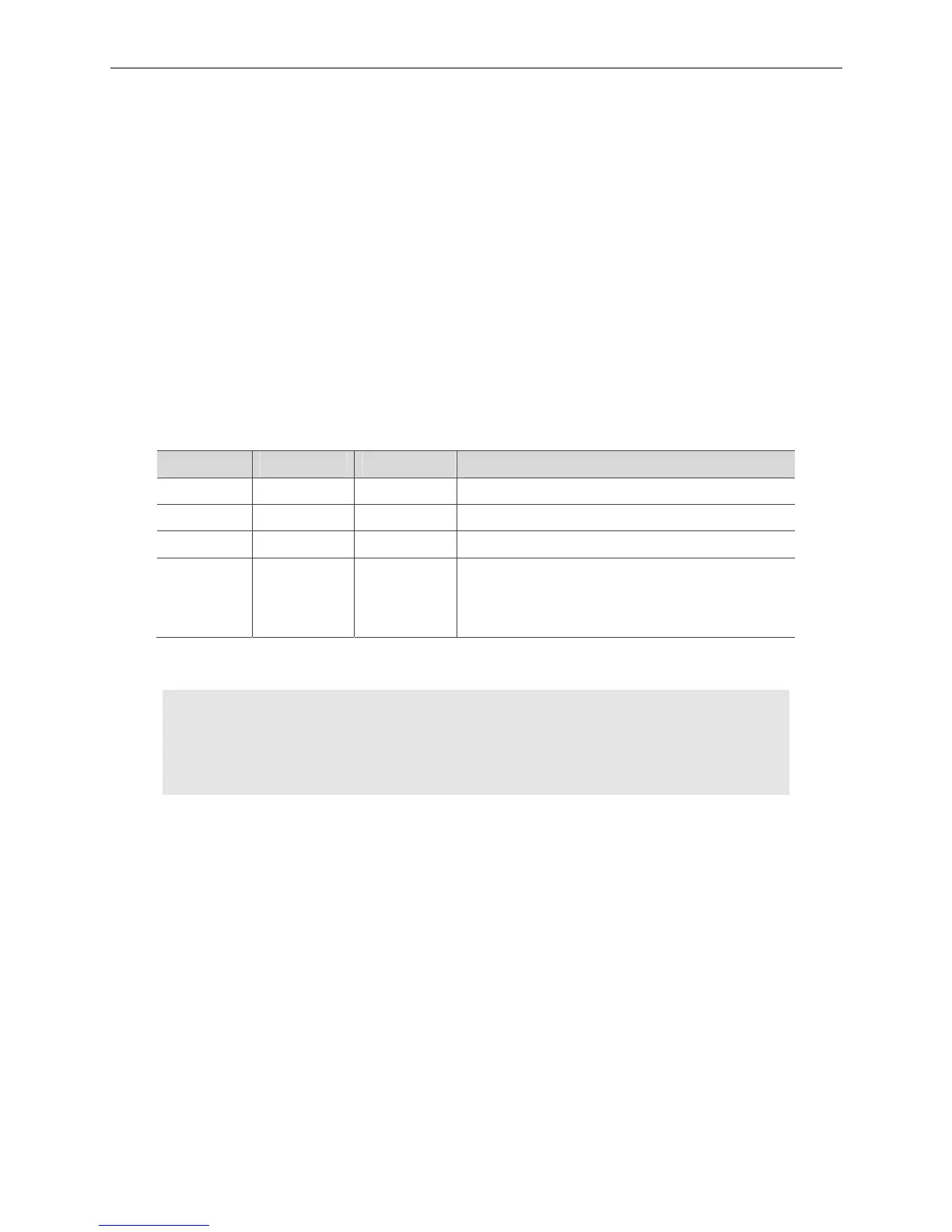
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
NodeID U16 Number Node ID
SlotNo U16 Number Slot ID
BitNum U16 Option
Enable the function of pitch error compensation
0: Disable
1: Enable
Example
U16 Status;
U16 CardNo = 16, AxisNo=0, SlotNo=0, Enable=1
Status = _ECAT_Slave_CSP_Pitch_Set_Enable(CardNo, AxisNo, SlotNo, Enable);

 Loading...
Loading...