9.29 _ECAT_Slave_CSP_Virtual_Set_Enable
Syntax
U16 PASCAL _ECAT_Slave_CSP_Virtual_Set_Enable(U16 CardNo, U16 AxisNo, U16 SlotNo,
U16 Enable)
Purpose
This is for enabling function of virtual position.
After enabling the function of virtual position, the specified position (acquired by
_ECAT_Slave_Motion_Get_Position in section 8.5) will be changed to the vitual position from the
motor’s feedback position.
Since EtherCAT master will do the compensation for the specified axis, the motor’s feedback
position will be slightly different from the machine’s actual position (virtual position) when
applying the function of interval compensation and E-cam.
To acquire the motor’s actual feedback position, please use the API
(_ECAT_Slave_Motion_Get_Actual_Position) in section 8.13.
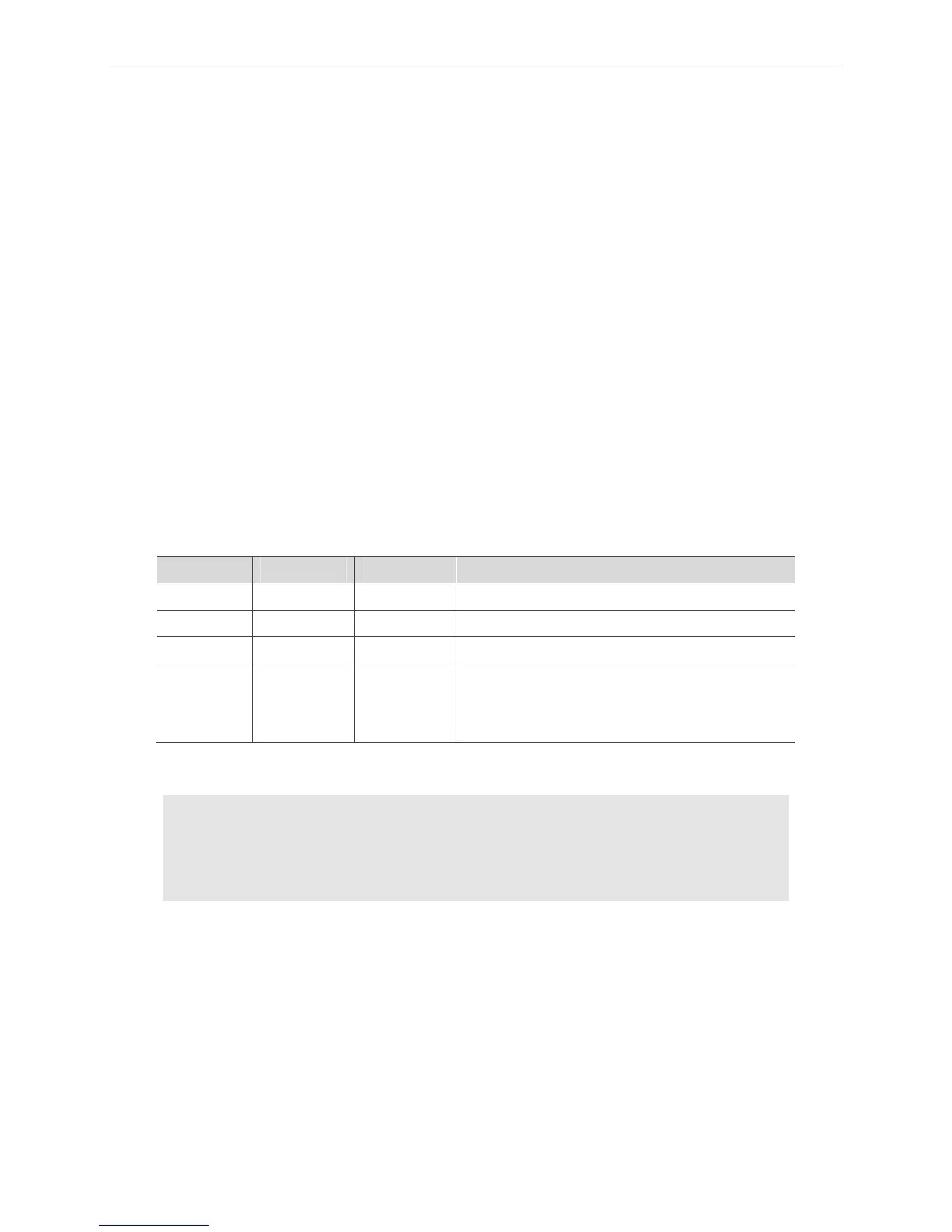
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Axis ID
SlotNo U16 Number Slot ID
Enable U16 Option
Enable the function of virtual position
0: Disable
1: Enable
Example
U16 Status;
U16 CardNo = 16, AxisNo=0, SlotNo=0, Enable=1;
Status = _ECAT_Slave_CSP_Virtual_Set_Enable(CardNo, AxisNo, SlotNo, Enable);