EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017 9-53
9
9.30 _ECAT_Slave_CSP_Virtual_Set_Command
Syntax
U16 PASCAL _ECAT_Slave_CSP_Virtual_Set_Command(U16 CardNo, U16 AxisNo,
U16 SlotNo, I32 Command)
Purpose
This is for setting the virtual position and replacing the current position with the specified position.
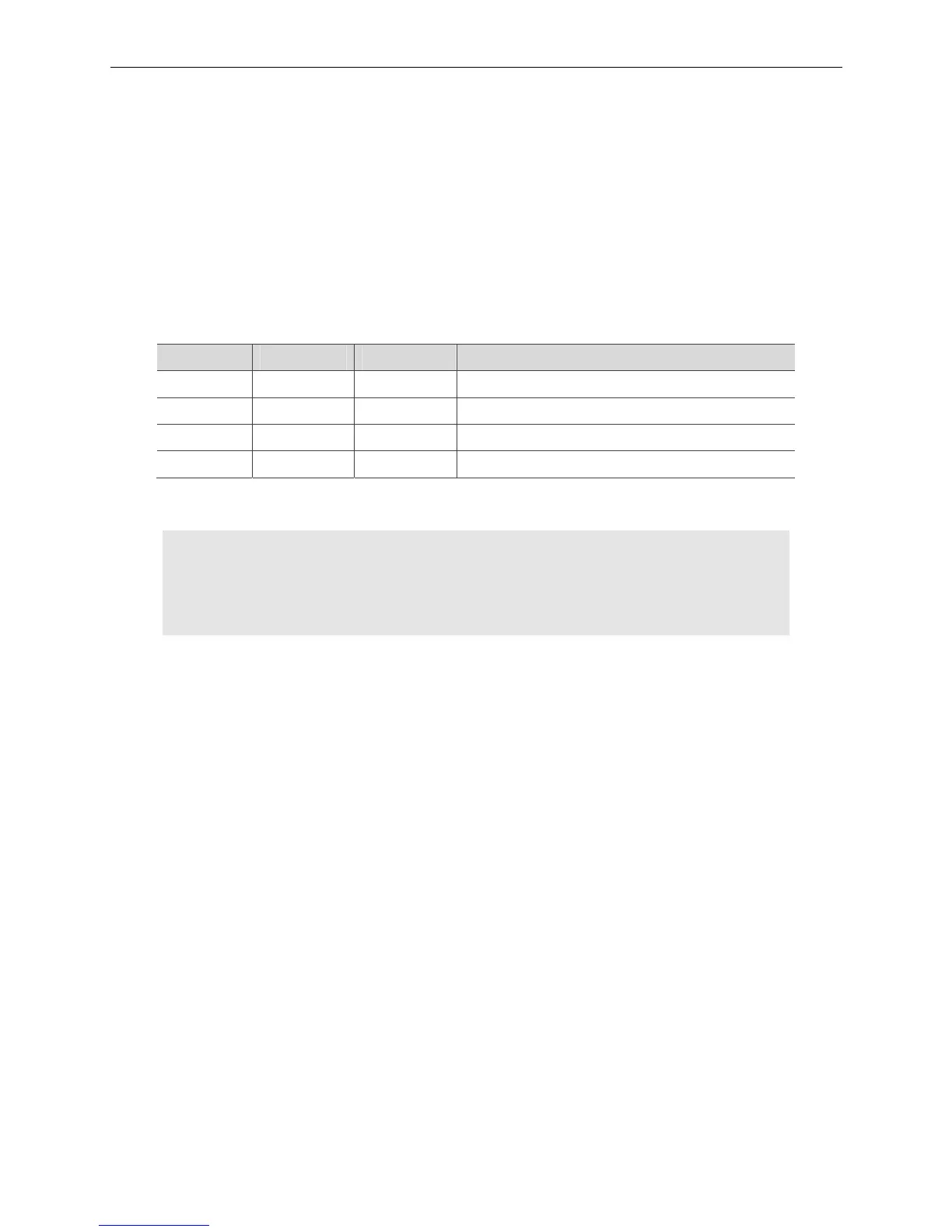
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Axis ID
SlotNo U16 Number Slot ID
Command I32 Value The specified position
Example
U16 Status;
U16 CardNo = 16, AxisNo=0, SlotNo=0, Command=0;
Status = _ECAT_Slave_CSP_Virtual_Set_Command(CardNo, AxisNo, SlotNo, Command);