8.6 _ECAT_Slave_Motion_Set_Position
Syntax
U16 PASCAL _ECAT_Slave_Motion_Set_Position(U16 CardNo, U16 AxisNo, U16 SlotNo,I32
NewPosition)
Purpose
This is for specifying current feedback position of the axis. This will change the position data set
in the servo drive or pulse module, which might also alter the machine’s coordinates. Please pay
extra attention when using this API.
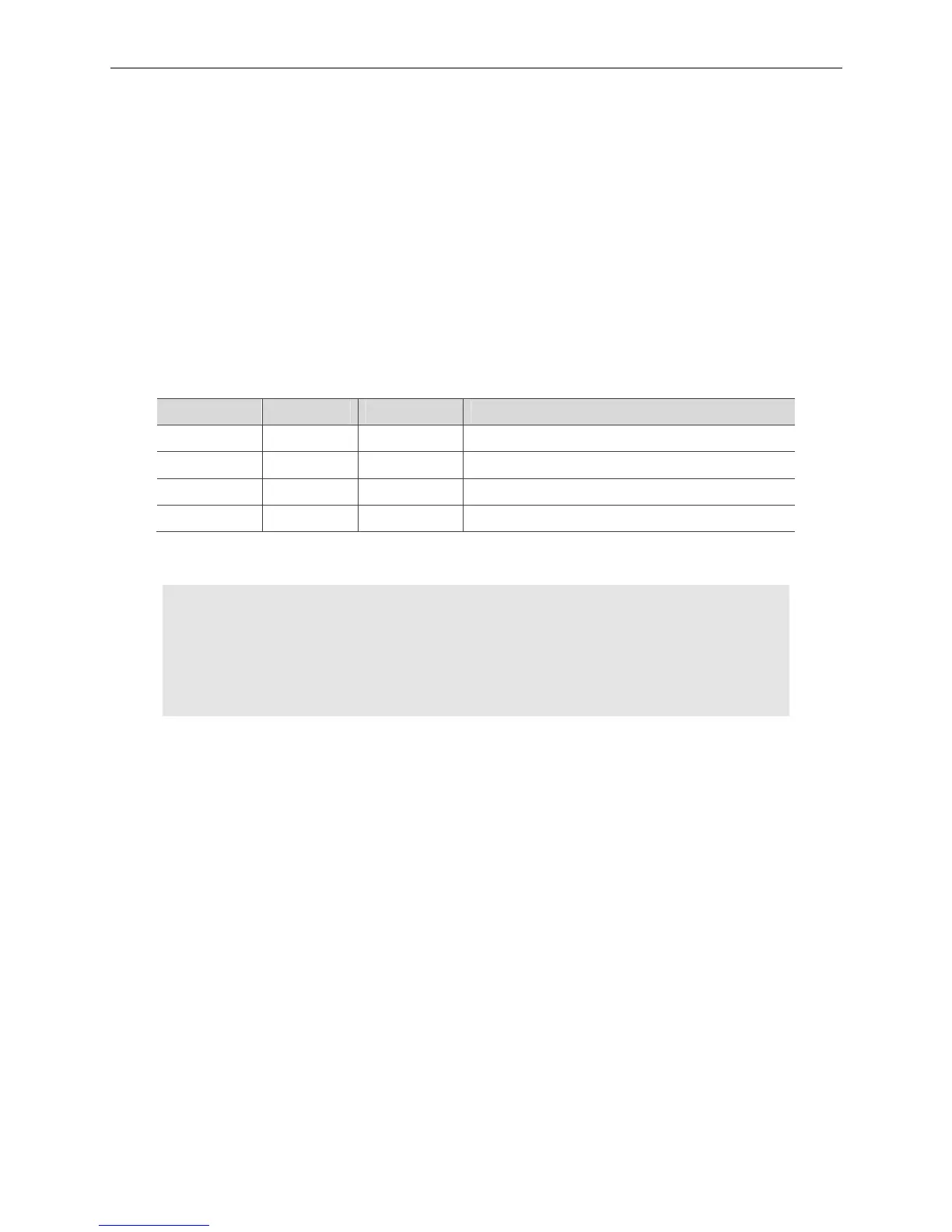
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
NewPosition I32 Value Specify current feedback position
Example
U16 Status;
U16 CardNo=16,AxisNo=1,SlotNo=0;
I32 NewPosition=2500000;
Status = _ECAT_Slave_Motion_Set_Position(CardNo, AxisNo, SlotNo, NewPosition);