9.15 _ECAT_Slave_CSP_Velocity_Change
Syntax
U16 PASCAL _ECAT_Slave_CSP_Velocity_Change (U16 CardNo, U16 AxisNo,
U16 SlotNo, I32 NewTargetSpd, F64 Tsec)
Purpose
This is for setting the new target speed of single axis.
Note:
1. This function is available when the current command running with constant speed.
2. This function can be carried out in mode 0 of _ECAT_Slave_CSP_Feedrate_Overwrite.
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
NewTargetSpd I32 Pulse / second The new target speed
Tsec F64 Second
The specified acceleration/deceleration time for
speed changing.
Example
U16 Status;
U16 CardNo=16, AxisNo=1, SlotNo=0;
I32 NewTargetSpd =1000000;
F64 Tsec=0.1;
Status = _ECAT_Slave_CSP_Velocity_Change (CardNo, AxisNo, SlotNo,
NewTargetSpd,Tsec);
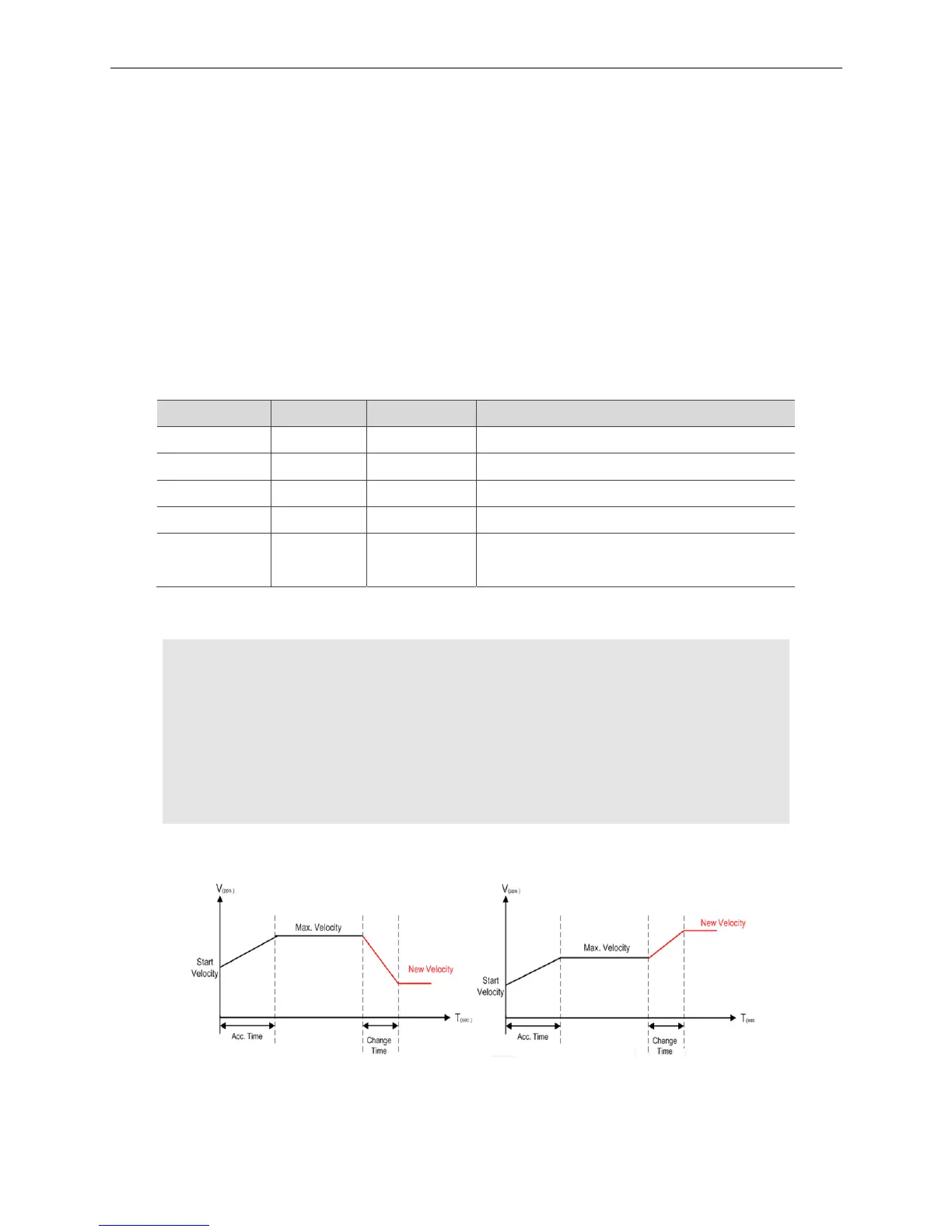
Description
Figure 9.15.1 This function is identical to mode 0 of _ECAT_Slave_CSP_Feedrate_Overwrite