High Speed Pulse Compare Function EtherCAT Programming Guide
27-22
March, 2017
27
Description
As shown in the above example, level_table is a data array. It translates the trigger state at the
32 positions into a 32-bit value. Then, these values are input in the array. Find more information
in the following section.
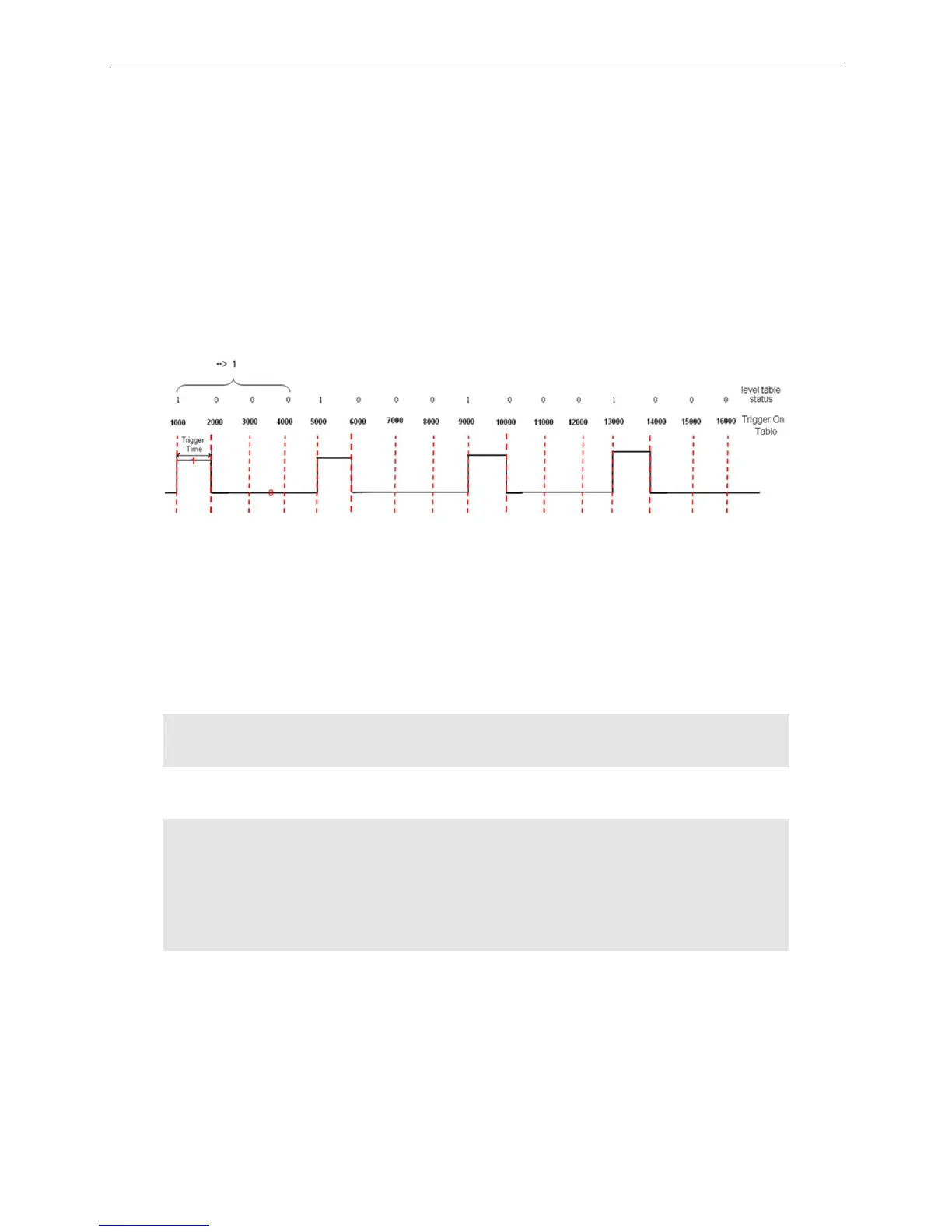
Output mode of user-defined intervals and trigger level
In this mode, users can define the position (pulse) for the trigger, which is the same as mode 0.
Meanwhile, you can also set the trigger level (high / low). See the figure below.
Figure 27.12.4 Output mode of user-defined intervals and trigger level (Correct)
Note:
1. The trigger-on position is set by “Pos_table” of the API
“_ECAT_Compare_Set_Channel1_Position_Table”.
The position array of pulse is as follows:
I32 pos_table[16] ={1000, 2000, 3000, 4000, 5000, 6000, 7000, 8000, 9000, 10000, 11000,
12000, 13000, 14000, 15000, 16000};
As the pulse number to be compared is less than 32, only level_table[0] in level_table is required
for triggering the signal as shown in figure 27.12.4.
U32 level_table[16] ={0x1111,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
// Hexadecimal value, 0x00001111 = binary array, [0000 0000 0000 0000 0001 0001 0001 0001]
B
// Refer to the pulse array with setting of pos_table, a signal will be triggered only at position 1000,
5000, 9000, and 13000 (pulse).

 Loading...
Loading...