9.25 _ECAT_Slave_CSP_Start_Mabrline_Move
Syntax
U16 PASCAL _ECAT_Slave_CSP_Start_Mabrline_Move (U16 CardNo, U16 AxisNum,
U16 *AxisArray, U16 *SlotArray, I32 *Target1Point, I32 *Target2Point, I32 StrVel,
I32 First_ConstVel, I32 Second_ConstVel, I32 EndVel, F64 Tacc_Step1, F64 Tacc_Step2,U16
Abs_Rel)
Purpose
This is for setting to smooth the operation of point-to-point motion of multiple axes.
Note:
1. This API function is similar to the API “_ECAT_Slave_CSP_Start_Msbrline_Move” (section 9.11). The
difference between them is that this API will automatically calculate the corner speed based on the set
accerlation and deceleration.
2. The corner speed of this API is identical to the API “_ECAT_Slave_CSP_Speed_Continue_Enable”
(section 9.17). However, it takes effect only in the path that is being executed by this API.
Parameter
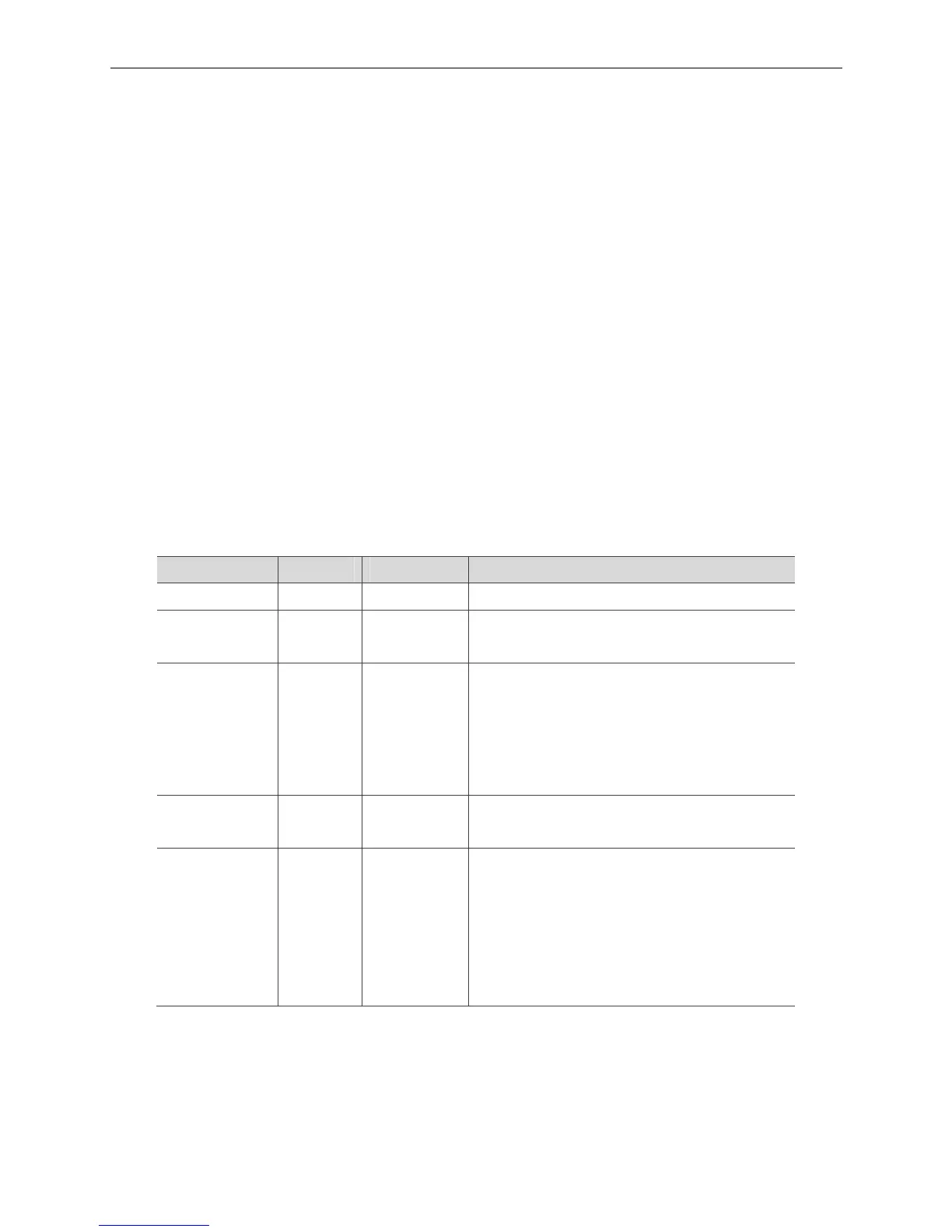
Name Data type Property Description
CardNo U16 Number Card No.
AxisNum U16 Quantity
Axis number to be used for synchronous motion
control
AxisArray U16*
Array for each
axis
Array for each axis (node ID); the array number
should equal to the axis number
AxisNo Array[0] stores the first node
AxisNo Array[1] stores the second node
….
SlotArray U16*
Array for each
slot
Array for each axis (slot ID); the array number should
equal to the axis number
Target1Point I32*
Array of pulse
for each axis
First position; the array number should equal to the
axis number
Target1Point[0] stores the first point of the first axis.
Target1Point[1] stores the first point of the second
axis
….