9.20 _ECAT_Slave_CSP_Scurve_Rate
Syntax
U16 PASCAL _ECAT_Slave_CSP_Scurve_Rate (U16 CardNo , U16 AxisNo ,
U16 SlotNo , U16 Ratio)
Purpose
This is for setting the ratio of T-curve and S-curve during acceleration and deceleration.
Note:
1. Once this function is enabled, it will change the S-curve ratio of CSP motion command. However, the
setting of linear acceleration (T-curve) remains the same.
2. Like the function of _ECAT_Slave_CSP_Feedrate_Overwrite, multi-axis motion with continuous speed
can be achieved only when the first axis in the array is identical to the axis set in this API.
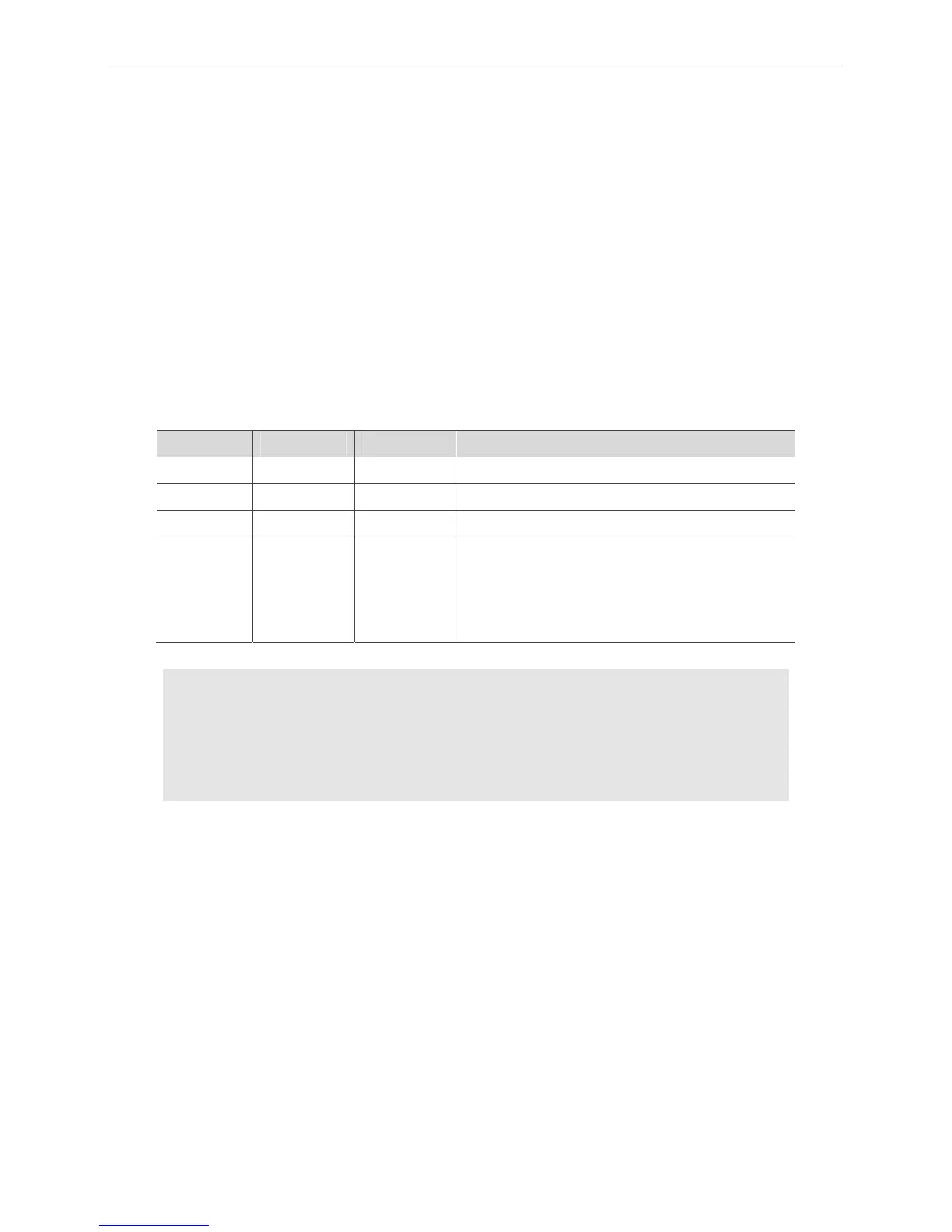
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
Ratio U16 Percentage
Ratio of linear acceleration (T-curve):
Range: 0 ~ 100
Please refer to the following description for more
information.
Example
U16 Status;
U16 CardNo=16, AxisNo=1, SlotNo=0;
U16 Ratio =100;
Status = _ECAT_Slave_CSP_Scurve_Rate (CardNo, AxisNo, SlotNo, Ratio);