EtherCAT Programming Guide EtherCAT Operation Example
March, 2017 3-21
3
3.6.2 Application examples
Program interface
Figure 3.6.2.1
(1) Activate and initialize interface card
Press the Initial Card key (as shown in figure 3.6.2.1) to start initializing the interface card.
Press the Find Slave key (as shown in figure 3.6.2.1) to start searching the connecting
modules.
For more information about the interface card initialization, please see “Activate interface
card” and “Initialize interface card” in section 3.1.2.
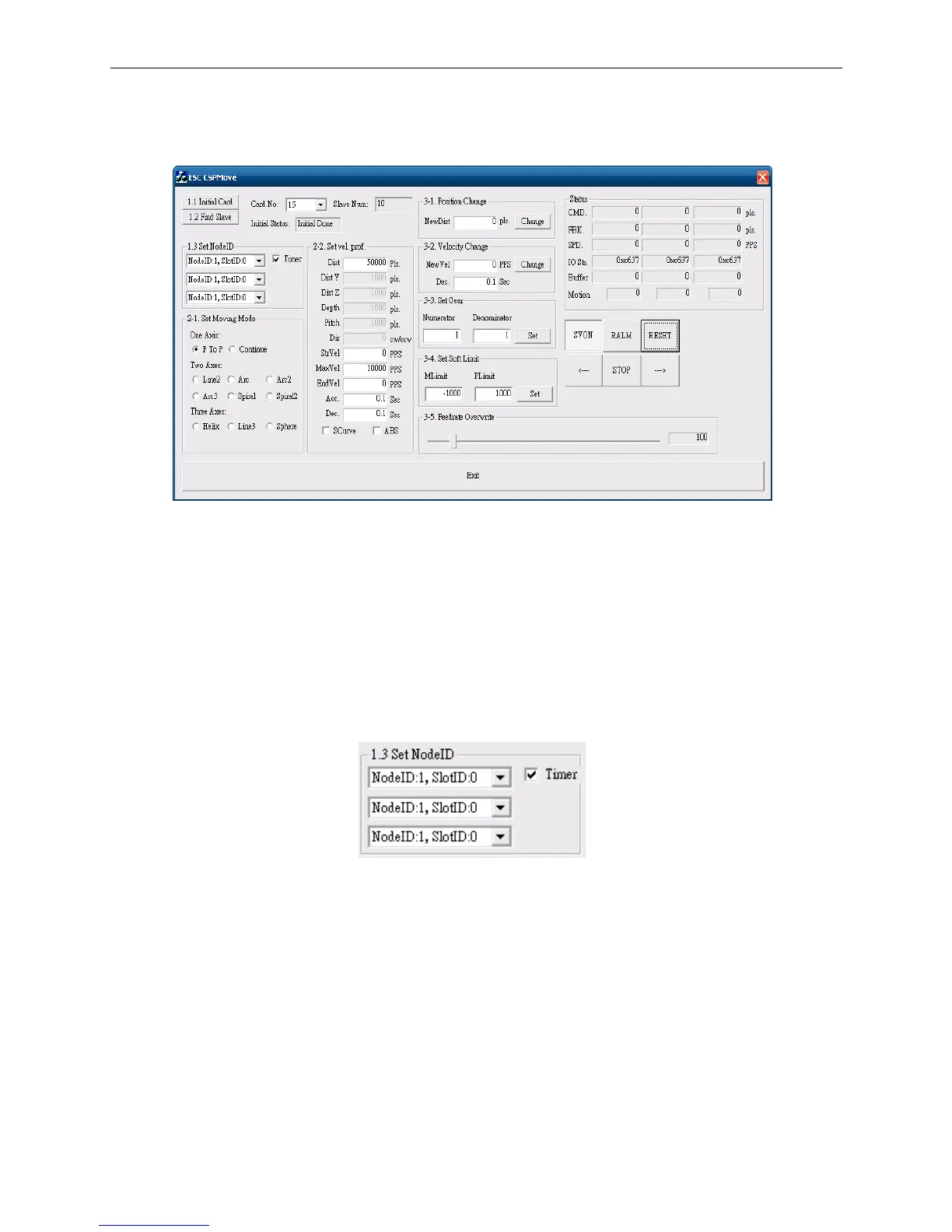
(2) Select Node ID and Slot ID for the servo drive and enable motion status display
Figure 3.6.2.2
Select Node ID and Slot ID and check the Timer box to display the motion status.
Set NodeID: Specify the Node ID to be executed. The parameters “AxisNo.” and “SlotNo”
in the API function.
Timer: Check the Timer box to display the current motion status.

 Loading...
Loading...