EtherCAT Programming Guide General Operation of Motion Axis
March, 2017 8-5
8
8.3 _ECAT_Slave_Motion_Sd_Stop
Syntax
U16 PASCAL _ECAT_Slave_Motion_Sd_Stop(U16 CardNo, U16 AxisNo, U16 SlotNo,
F64 Tdec)
Purpose
This is for setting the deceleration time for motor to decelerate to stop.
Parameter
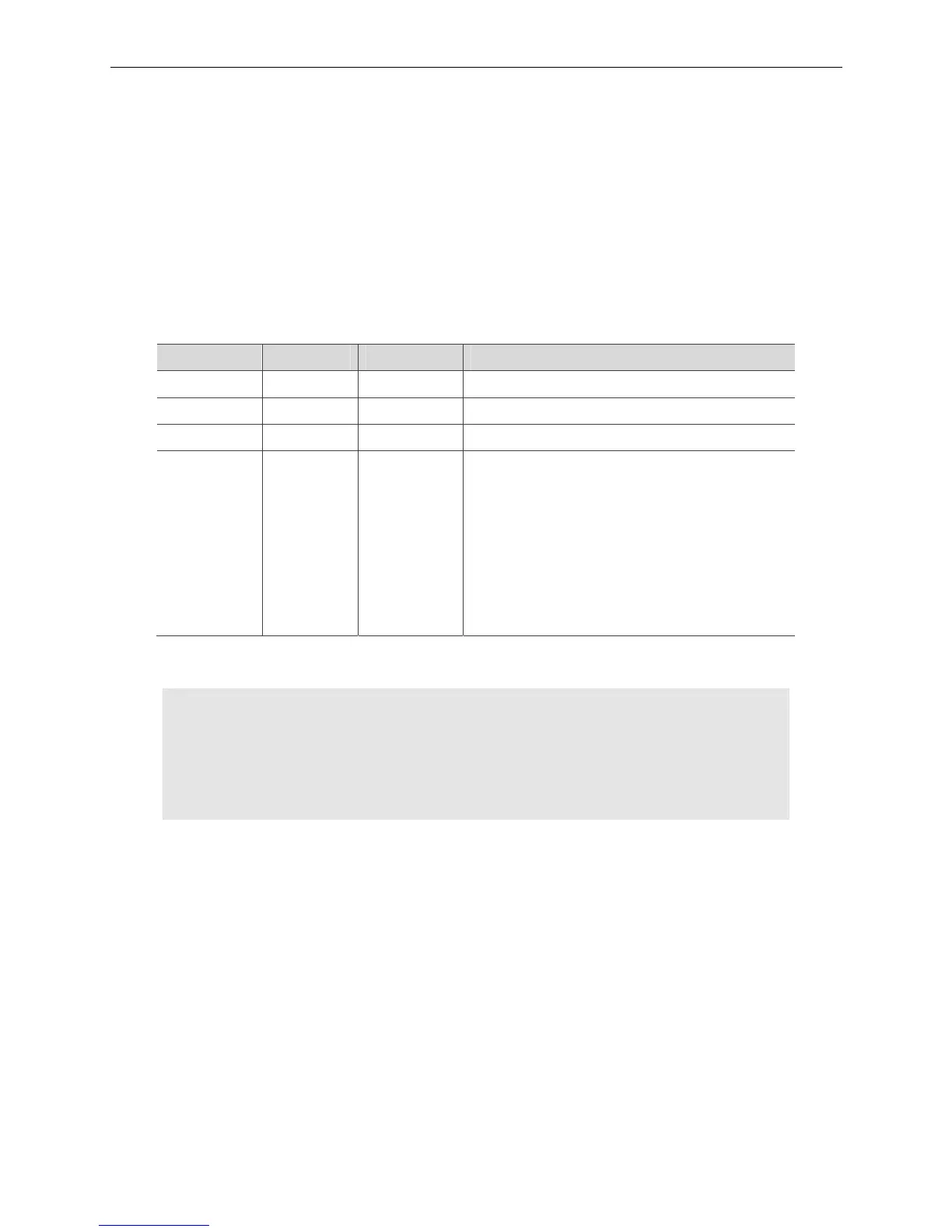
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
Tdec F64 Time
The specified deceleration time.
CSP, CSV, and CST mode are in the unit of second.
HOME, PP, PV and PT mode are using the unit of the
drive inc/s^2.
inc represents the unit for the slave setting. Please
refer to the user manual of the applied slave. (OD:
0x6083 Sub 0).
Example
U16 Status;
U16 CardNo=16,AxisNo=1,SlotNo=0;
F64 Tdec=0.1;
Status = _ECAT_Slave_Motion_Sd_Stop(CardNo, AxisNo, SlotNo, Tdec);

 Loading...
Loading...