EtherCAT Programming Guide MPG Operation
March, 2017 33-3
33
33.1 _ECAT_Slave_R1_EC5614_Set_MJ_Config
Syntax
U16 PASCAL _ECAT_Slave_R1_EC5614_Set_MJ_Config (U16 CardNo, U16 MJNo,
U16 MJType, U16 NodeID, U16 SlotNo, U16 AxisNum, U16 *AxisArray, U16 *SlotArray,
I32 *MaxSpeedArray, F64 *TaccArray, F64 *RatioArray )
Purpose
This is for setting the parameters of MPG function.
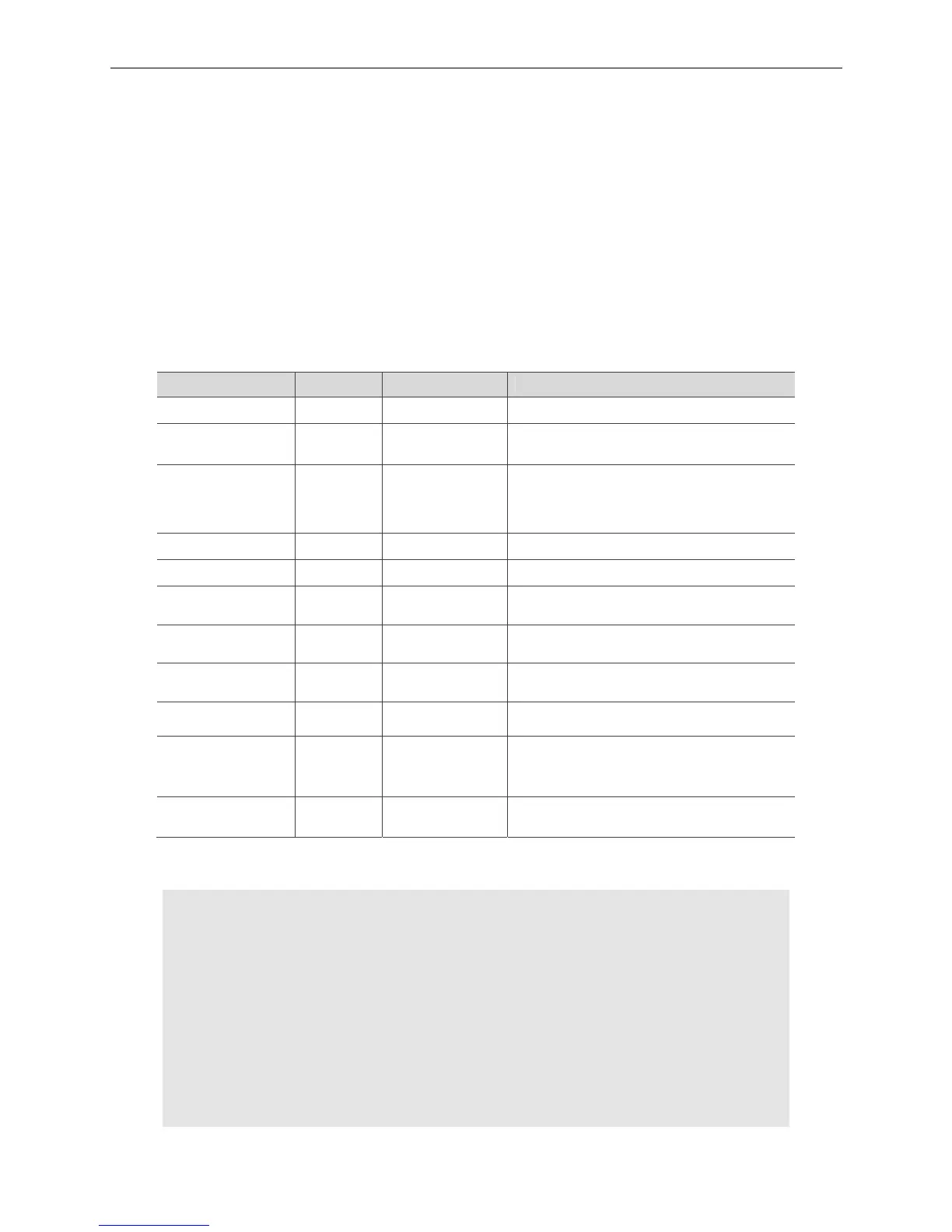
Parameter
Name Data type Property Description
CardNo U16
Number
Card number
MJNo U16
Number
Group number of MPG function. It supports
max. 8 groups, numbered from 0 to 7.
MJType U16
Option
Setting of MPG mode :
0: JOG mode
1: Apply MPG (x1)
2: Apply MPG (x4)
NodeID U16
Number
Node ID
SlotNo U16
Number
Slot ID
AxisNum U16 Number
The axis number reqruied by MPG/JOG
(MPG: max. 6 axes; JOG: max. 2 axes)
AxisArray U16* Array of numbers
Data array of node number for the axis
controlled by the MPG module.
SlotArray U16* Array of numbers
Data array of slot number for the axis
controlled by the MPG module.
MaxSpeedArray I32*
Array of speed
limit
Data array of the max. speed for each axis.
(Unit: pps)
TaccArray F64*
Array of
acceleration time
Data array of the max. acceleration for each
axis contolled by MPG module. (Unit:sec)
(The speed is set by parameter
MaxSpeedArray)
RatioArray F64*
Array of output
ratio
For MPG mode only. It sets the ratio of MPG’s
pulse output.
Example
U16 Status = 0, CardNo = 16, NodeID = 0, SlotNo = 0, AxisNum = 2, MJNo = 2, MJType= 1;
U16 Enable = 1;
U16 AxisArray[2] = {1, 2};
U16 SlotArray[2] = {0, 0};
I32 MaxSpeedArray[2] = {100000, 200000};
F64 TaccArray[2] = {0.1, 0.1};
F64 RatioArray[2] = {1, 1};
// Setting relevant parameters is required.