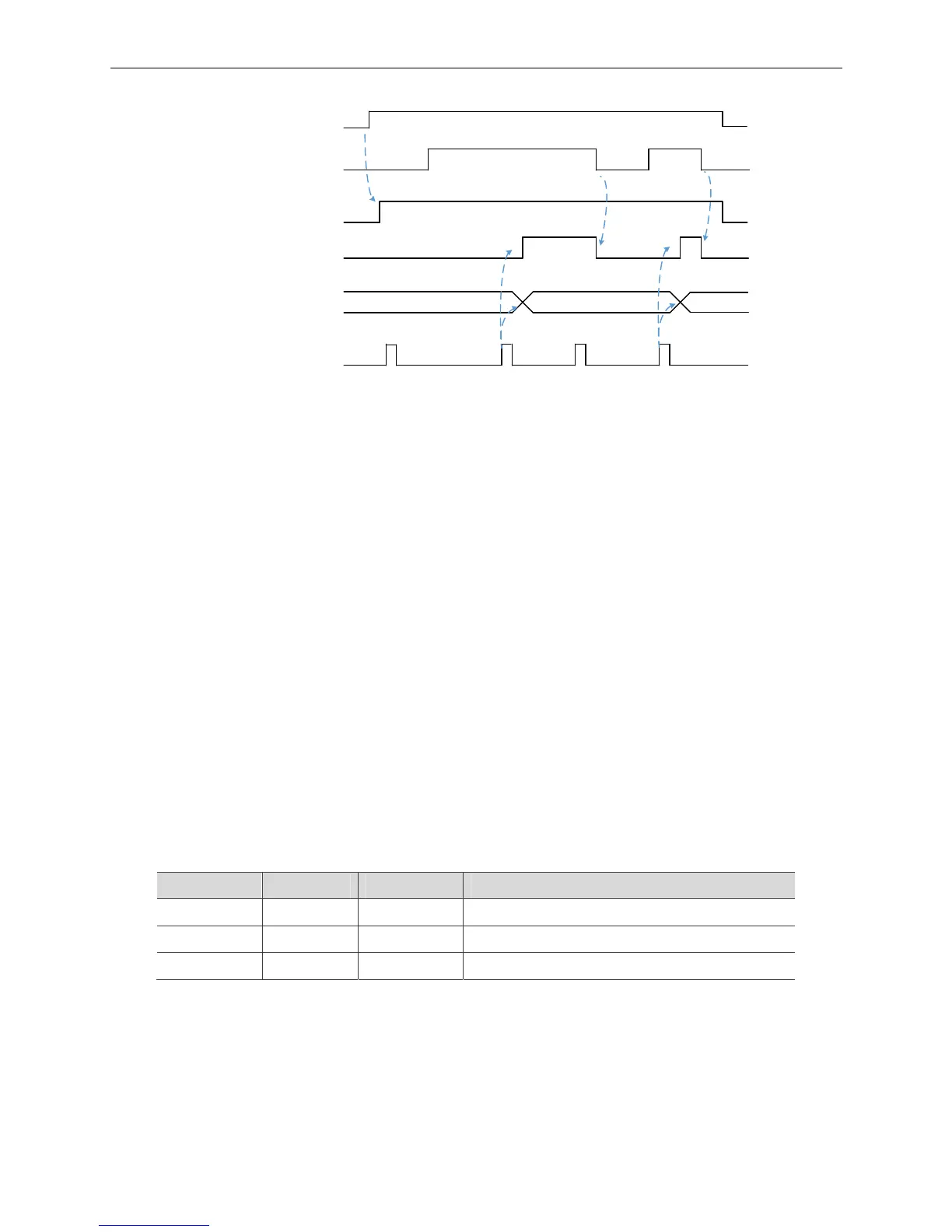
Enable Touch Probe function
60B8 bit 0
Start Touch Probe function
60B8 bit 4
Function enabled status
60B9 bit 0
Status of triggering signal
60B9 bit 1
Pulse position 60BA
Triggered signal
Start Touch Probe
Start Touch Probe
Record position 1 Record position 2
Trigger for
the 1
st
time
Trigger for
the 2
nd
time
Trigger for
the 3
rd
time
Trigger for
the 0
th
time
Figure 8.22.1 Touch Probe – Trigger the signal for once (60B8 bit 1 = 0)
8.23 _ECAT_Slave_Motion_Set_TouchProbe_QuickDone
Syntax
U16 PASCAL _ECAT_Slave_Motion_Set_TouchProbe_QuickDone(U16 CardNo, U16 AxisNo,
U16 SlotNo)
Purpose
This is for executing the 1
st
Touch Probe function again.
When OD code – 60B8 bit 1 is set to 0, this function will be executed once. To execute this
function repeatedly, users have to use _ECAT_Slave_Motion_Set_TouchProbe_Disable (section
8.24) to disable the function first. Then, use
_ECAT_Slave_Motion_Set_TouchProbe_QuickStart
(section 8.22) to enable it again. For more user-friendly way, you can directly re-activate the first
Touch Probe function through this API.
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID