8.10 _ECAT_Slave_Motion_Get_ControlWord
Syntax
U16 PASCAL _ECAT_Slave_Motion_Get_ControlWord (U16 CardNo , U16 AxisNo,
U16 SlotNo, U16 *ControlWord)
Purpose
This is for acquiring the current control word of the axis.
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
ControlWord U16* Data
Control word of the axis
(Please refer to the figure below for the definition. For
the reserved items, see the description of each slave.)
Example
U16 Status;
U16 CardNo=16,AxisNo=1,SlotNo=0;
U16 ControlWord ;
Status = _ECAT_Slave_Motion_Get_ControlWord (CardNo, AxisNo, SlotNo, &ControlWord);
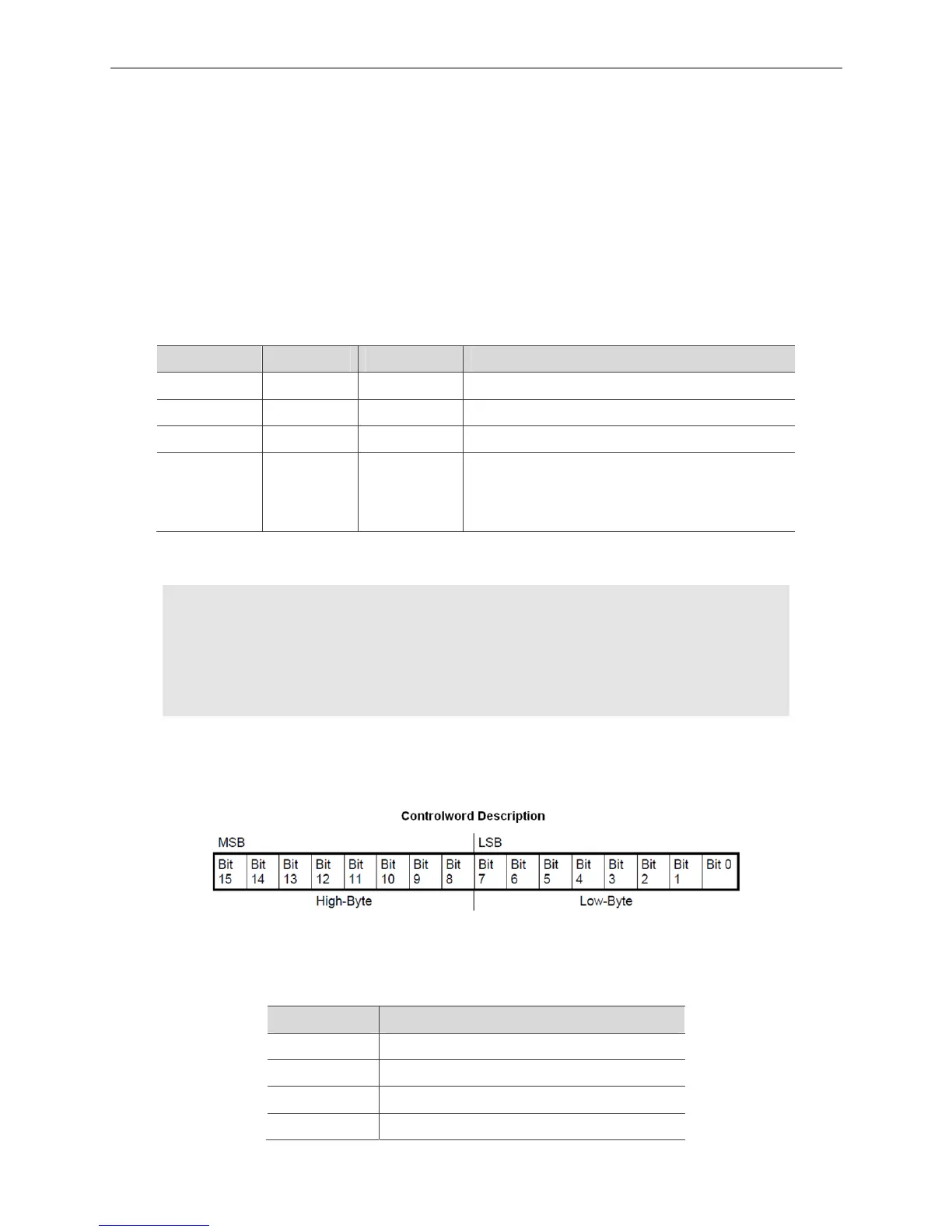
Description
Definition of 6040H: CANopen communication
Figure 8.2.1 Corresponding bits of control word
Definitions of the control word bits
Bit Name
0 Switch On
1 Enable Voltage (Servo on)
2 Quick Stop
3 Enable Operation (Motor enabled)

 Loading...
Loading...