EtherCAT Introduction EtherCAT Programming Guide
2-2 March, 2017
2
2.1 Maximum number of the slave device
Delta EtherCAT master has two types of operation system, RTX real-time operating system from
PAC and EtherCAT PCI motion card. Since the operational efficiency among both differs from
one another, the connected slave number is different.
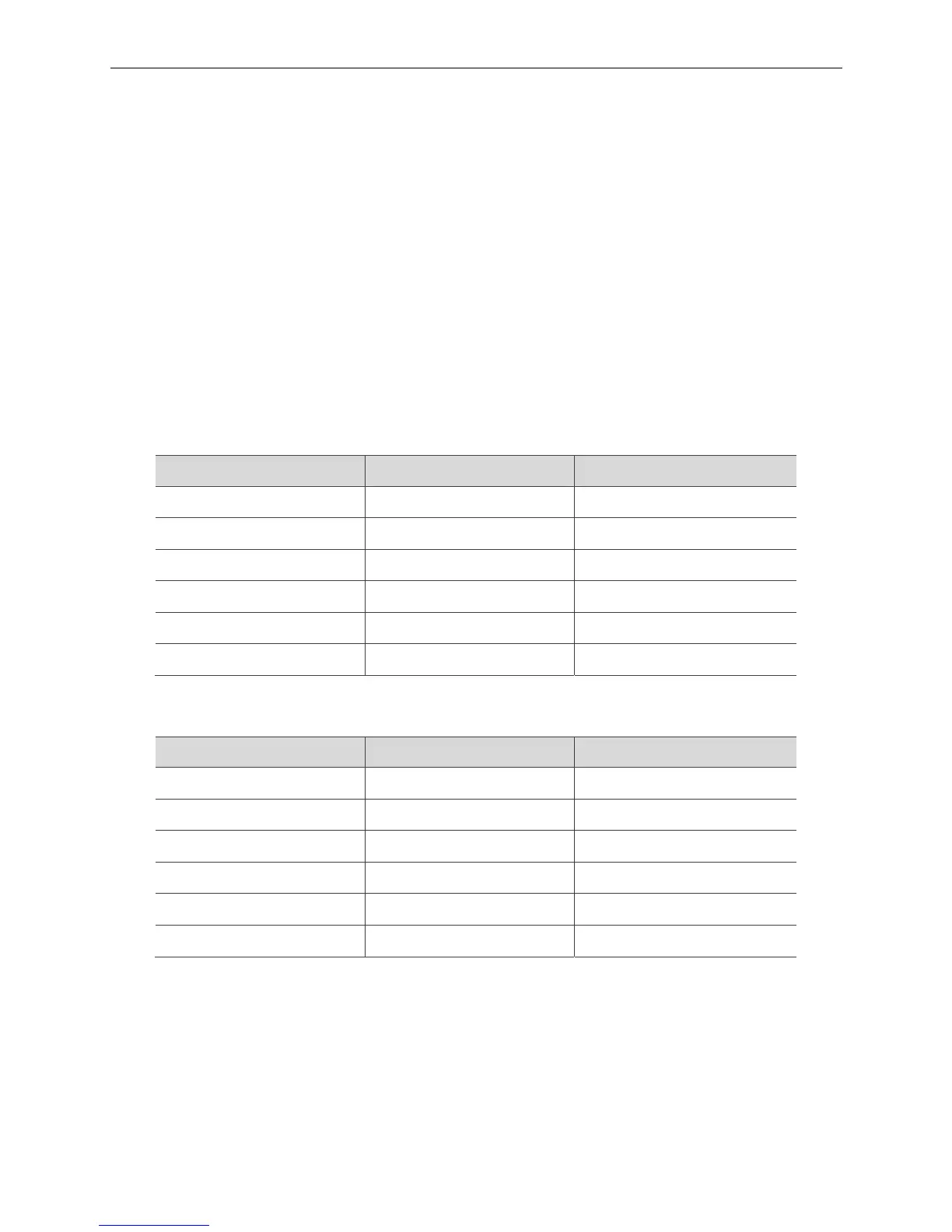
When EtherCAT master runs in RTX real-time operating system, the default of its communication
cycle is 1 ms (1K) and can connect up to remote modules and 64 motion axes, including servo
drives and pulse modules. There is no limitation on quantity of the device that connects to
EtherCAT master. However, if the communication cycle is shorter, the suggested maximum
number of the connected slave will be reduced in accordance with proportion. Please refer to
table 2.1.1 below for the suggested maximum slave quantity to avoid communication instability.
When EtherCAT master runs in PCI motion card, it can connect 64 remote modules and 32
motion axes at most with the default communication cycle 1 ms (1K). Please refer to table 2.1.2.
EtherCAT master runs in RTX real-time operating system of Delta PAC
Communication cycle (ms)
Max. number of the connected
remote module (1 ms)
Max. number of the connected
motion axis (1 ms)
4 ms 100 64
2 ms 100 64
1 ms 100 64
0.5 ms 50 32
0.25 ms 25 16
0.125 ms 22 8
Table 2.1.1 Suggested number of the slave
EtherCAT master runs in Delta PCI EtherCAT motion card
Communication cycle (ms)
Max. number of the connected
remote module (1 ms)
Max. number of the connected
motion axis (1 ms)
4 ms 64 32
2 ms 64 32
1 ms 64 32
0.5 ms 32 16
0.25 ms 16 8
0.125 ms 8 4
Table 2.1.2 Suggested number of the slave

 Loading...
Loading...