Operation of DI/DO Module EtherCAT Programming Guide
18-10 March, 2017
18
18.8 _ECAT_Slave_DIO_Set_Output_Error_Value
Syntax
U16 PASCAL_ECAT_Slave_DIO_Set_Output_Error_Value (U16 CardNo, U16 NodeID,
U16SlotNo, U16 Value)
Purpose
This is for setting the retentive status of each channel on remote DO module when EtherCAT
communication is disconnected.
Note: Please use _ECAT_Slave_DIO_Set_Output_Error_Mode (see section 18.7) to enable the retentive
function when EtherCAT communication is disconnected.
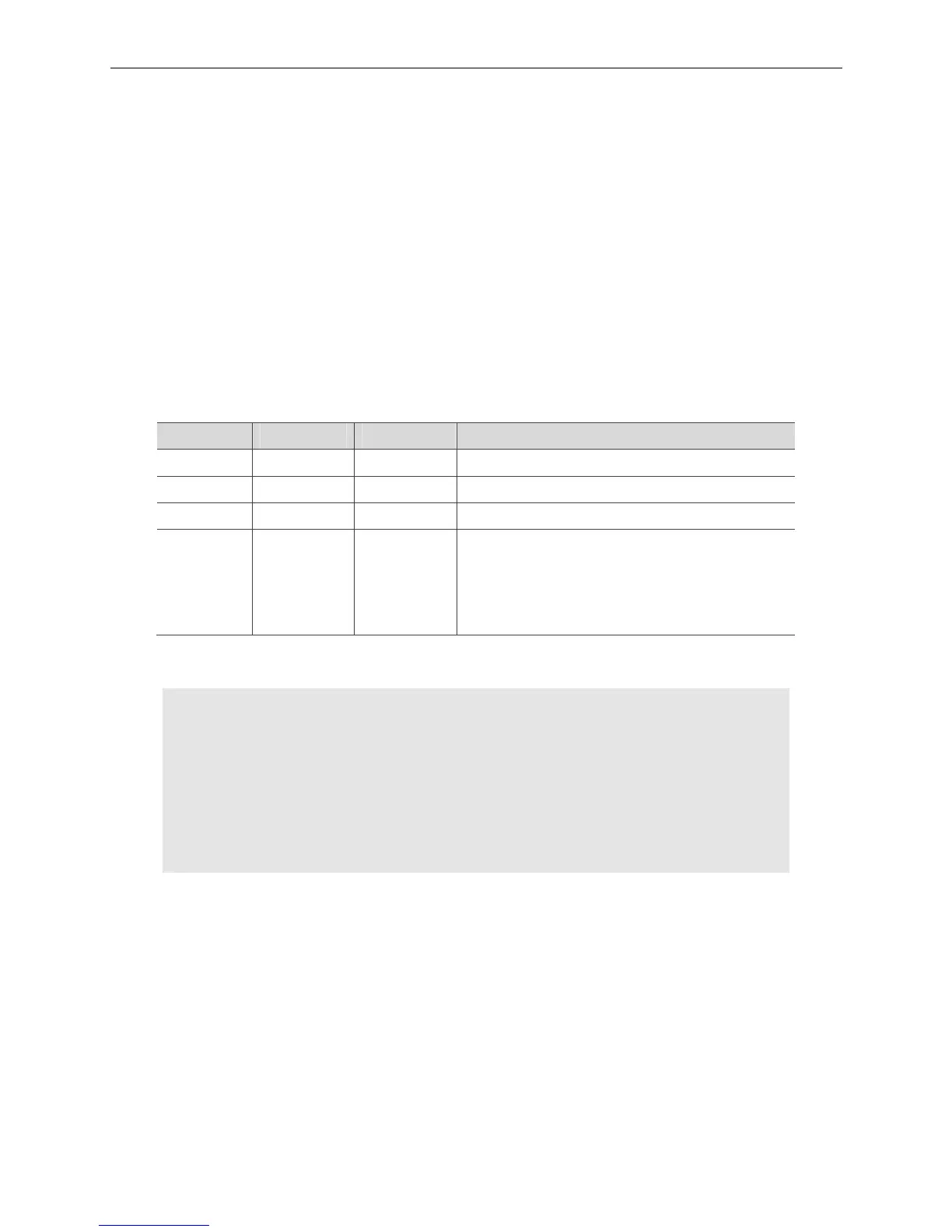
Parameter
Name Data type Unit Description
CardNo U16 Number Card No.
NodeID U16 Number Node ID
SlotNo U16 Number Slot ID
Value U16 Value
Bit0 ~ 15 represent the output channels Y0~Y15
respectively.
0: Output channel is off
1: Output channel is on
Example
U16 Status;
U16 CardNo=16, NodeID=1, SlotNo=0;
// Change the function of the first 8 channels to retentive function when communication is
disconnected.
U16 Value=0x0F;
Status=_ECAT_Slave_DIO_Set_Output_Error_Value (CardNo, NodeID, SlotNo, Value);