MPG Operation EtherCAT Programming Guide
33-6 March, 2017
33
33.3 _ECAT_Slave_R1_EC5614_Get_IO_Status
Syntax
U16 PASCAL _ECAT_Slave_R1_EC5614_Get_IO_Status (U16 CardNo, U16 NodeID,
U16 SlotNo, U16 *IOStatus)
Purpose
This is for acquiring the DI/O contact status of MPG module.
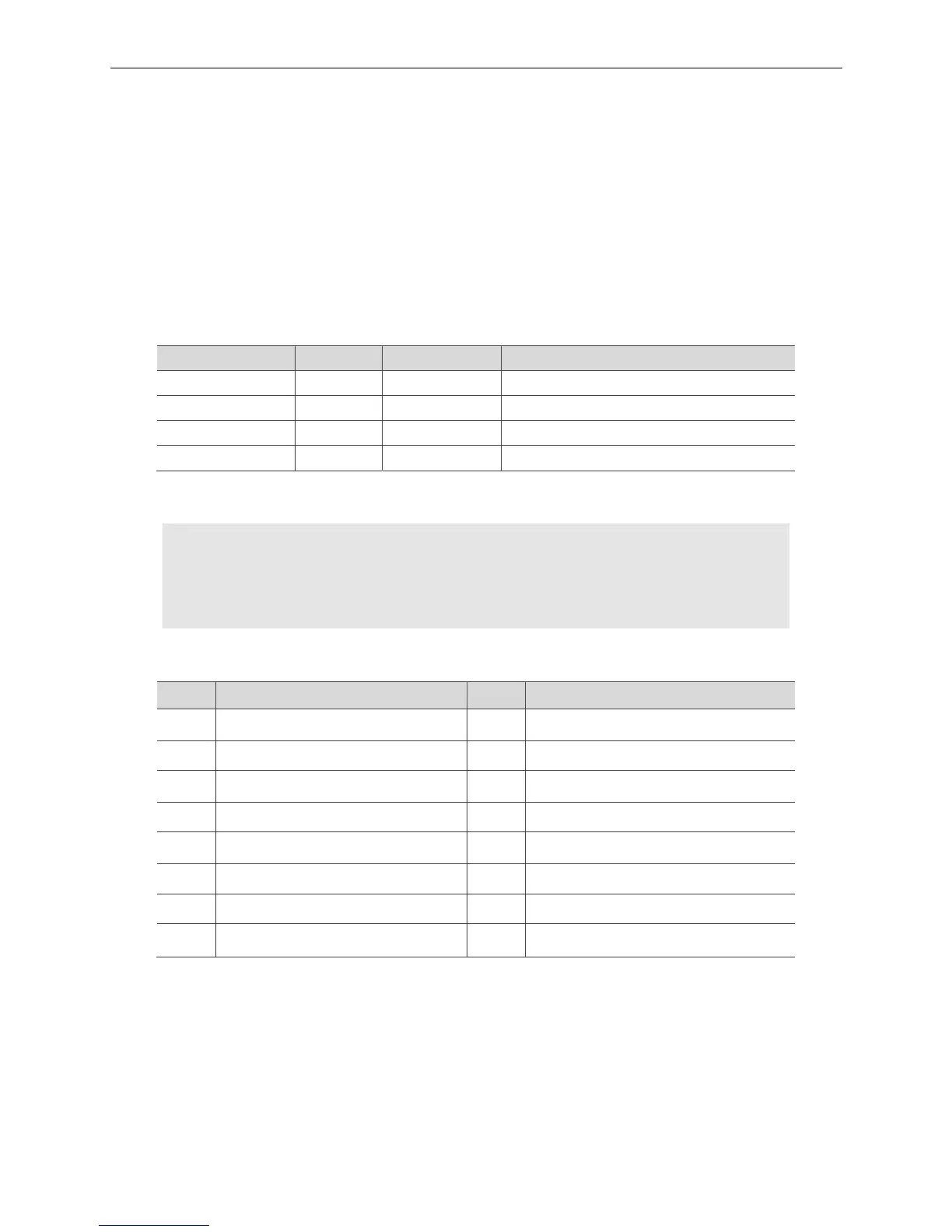
Parameter
Name Data type Property Description
CardNo U16 Number Card number
NodeID U16 Number Node ID
SlotNo U16 Number Slot ID
IOStatus U16* Value DI/O status of MPG module
Example
U16 Status = 0, CardNo = 16, NodeID = 0, SlotNo = 0;
U16 IOStatus = 0;
Status = _ECAT_Slave_R1_EC5614_Get_IO_Status (CardNo, NodeID, SlotNo, &IOStatus);
Status description
Bit Definition Bit Definition
0 JY- 8 X-Axis is selected.
1 JY+ 9 Y-Axis is selected.
2 JX- 10 Z-Axis is selected.
3 JX+ 11 U-Axis is selected.
4
Scale: ×1
12 W-Axis is selected.
5
Scale: ×10
13 C-Axis is selected.
6
Scale: ×100
14 Reserved
7 Reserved 15 MPG Enabled

 Loading...
Loading...