9.23 _ECAT_Slave_CSP_Sync_Config
Syntax
U16 PASCAL _ECAT_Slave_CSP_Sync_Config(U16 CardNo, U16 AxisNum, U16 *AxisArray,
U16 *SlotArray, U16 Enable)
Purpose
This is for setting the function of synchronous motion of multiple axes. The function allows the
EtherCAT master issue up to 20 CSP motion commands at the same time.
Note:
1. When some commands are issued to the the same axis, they will be executed according to the issuing
sequence.
2. Before starting the synchronous motion control, users should complete the setting of this API to enable
the function and issue the CSP motion commands one by one. Then, apply the API
“_ECAT_Slave_CSP_Sync_Move” to start executing all CSP commands.
Example
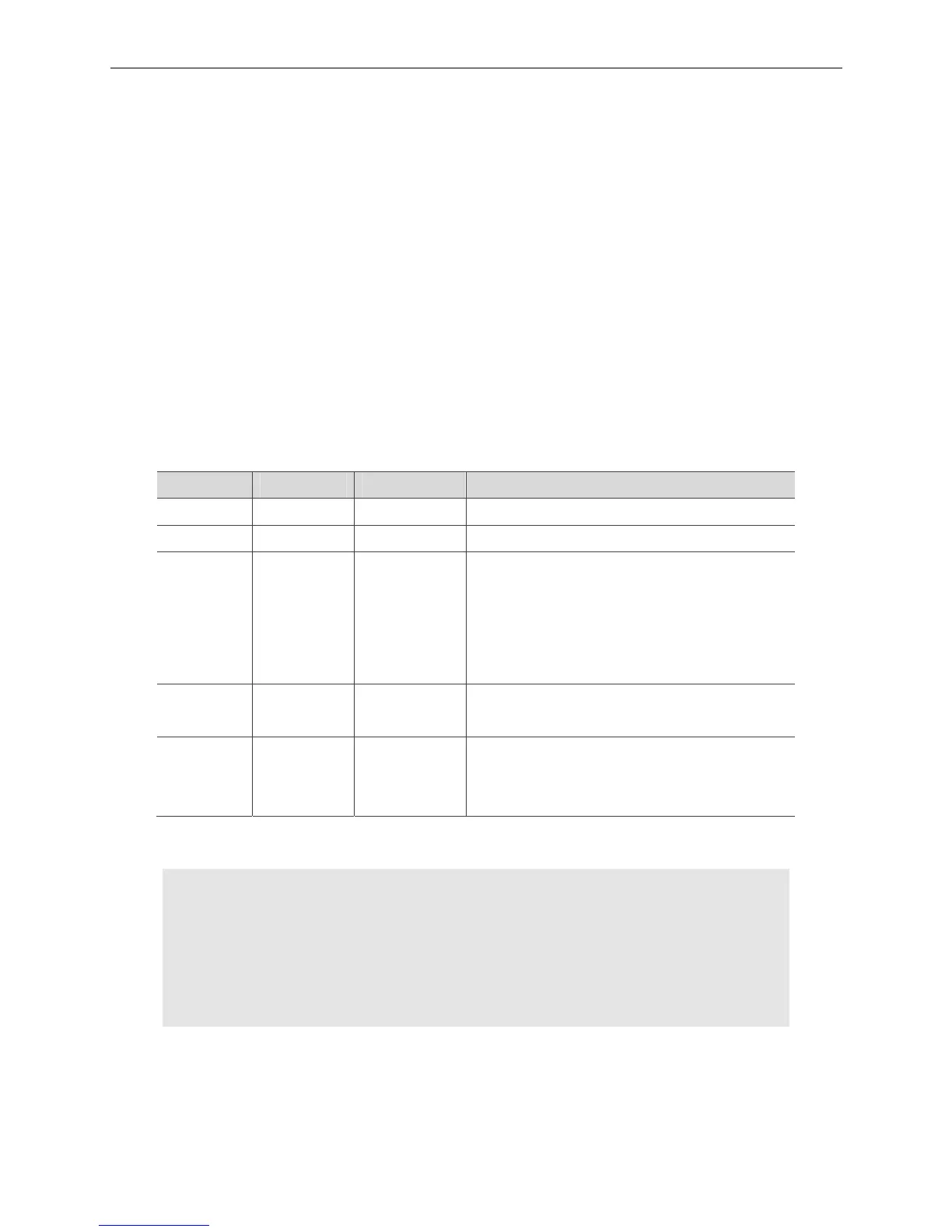
Name Data type Property Description
CardNo U16 Number Card No.
AxisNum U16 Quantity Axis number to be enabled
AxisArray U16*
Array for each
axis
Array for each axis (node ID); the array number
should equal to the axis number
AxisNo Array[0] stores the first node
AxisNo Array[1] stores the second node
….
SlotArray U16*
Array for each
slot
Array for each axis (slot ID); the array number should
equal to the axis number
Enable U16 Option
Function of synchronous motion of multiple axes
0: Disable
1: Enable
Example
U16 Status;
U16 CardNo = 16, AxisNum = 2, AxisArray[2] = {0, 1}, SlotArray[2] = {0, 0};
U16 Enable = 1;
Status = _ECAT_Slave_CSP_Sync_Config (CardNo, AxisNum, AxisArray, SlotArray,
Enable);