EtherCAT Programming Guide EtherCAT Introduction
March, 2017
2-3
2
2.2 Initialize RTX runtime environment
For running the real-time operating system uploaded by synchronous function of EtherCAT
communication, RTX has one CPU and one Ethernet communication port. If you are applying a
Delta EtherCAT motion card, such as PCI-L221PPI, then there is nothing to do with RTX system.
When the host computer has started up, the RTX runtime environment will not be automatically
loaded into the system. It will start running only after instructions related to EtherCAT initialization
API are executed. Or, you can also manually enable RTX. See the steps below.
Once RTX is enabled, you can start to use other related functions and APIs in EtherCAT dynamic
link library.
(1) Open [RTX Properties]
File location: [Start] > [All programs] > [IntervalZero] > [RTX 2012] > [RTX Properties]
(2) Enable RTX devices
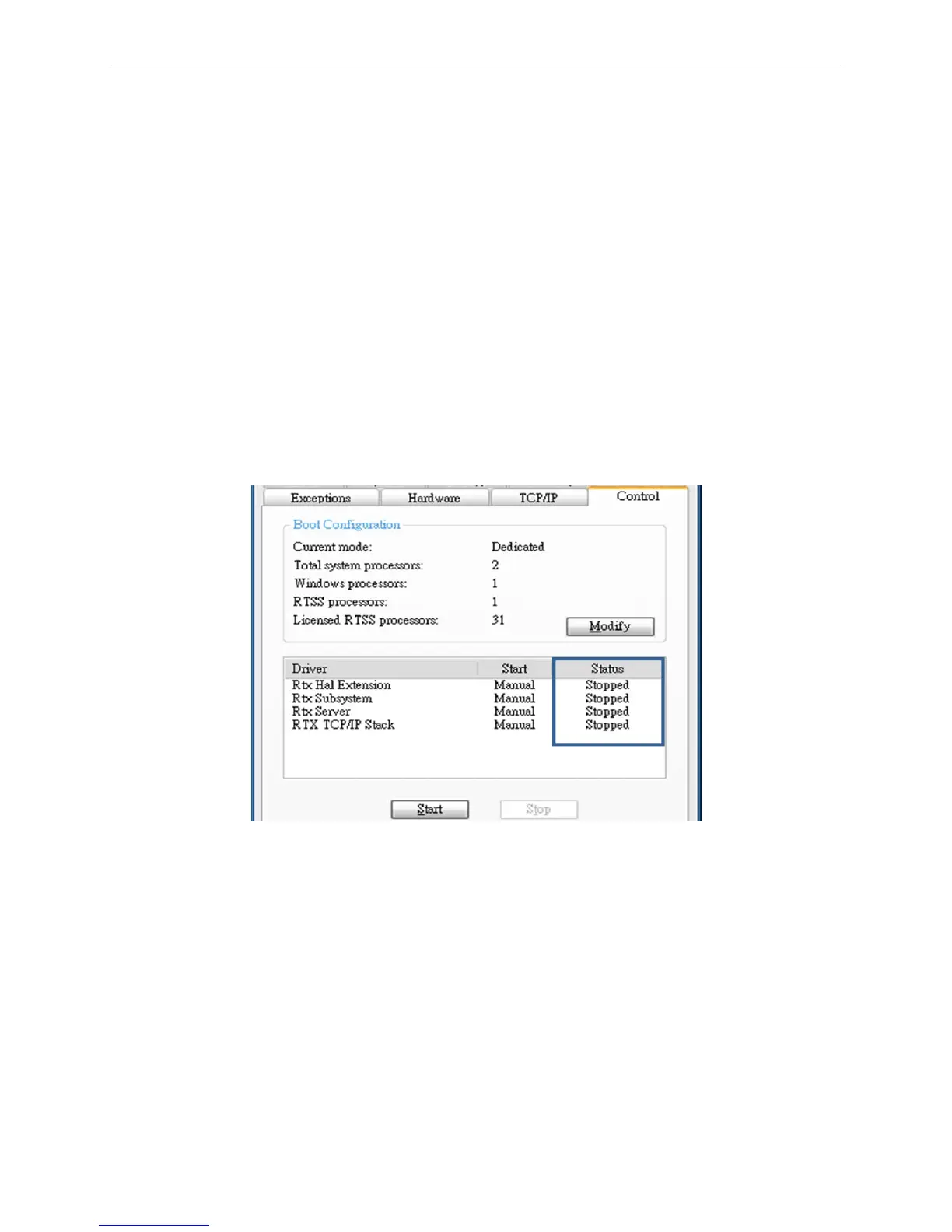
After opening [RTX Properties], select the Control tab and check the Driver status. If the driver
status shows “Stopped”, press the Start key to have the RTX devices start running.
Figure 2.2.1 RTX devices in Stopped status