EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017
9-11
9
Example
U16 Status;
U16 CardNo=0, AxisNoArray[2]={1,2}, SlotID[2]={0, 0};
I32 EndPoint [2]= {100000,100000};
F64 Angle=180, TPhase1=0.2, TPhase2=0.1;
I32 StrVel=0, ConstVel =50000, EndVel=20000;
U16 Scurve =0, Abs_Rel =0;
Status = _ECAT_Slave_CSP_Start_Arc2_Move(CardNo, AxisNoArray, SlotID, EndPoint, Angle,
Strvel, ConstVel, EndVel, TPhase1, TPhase2, Scurve, Abs_Rel);
Descirption
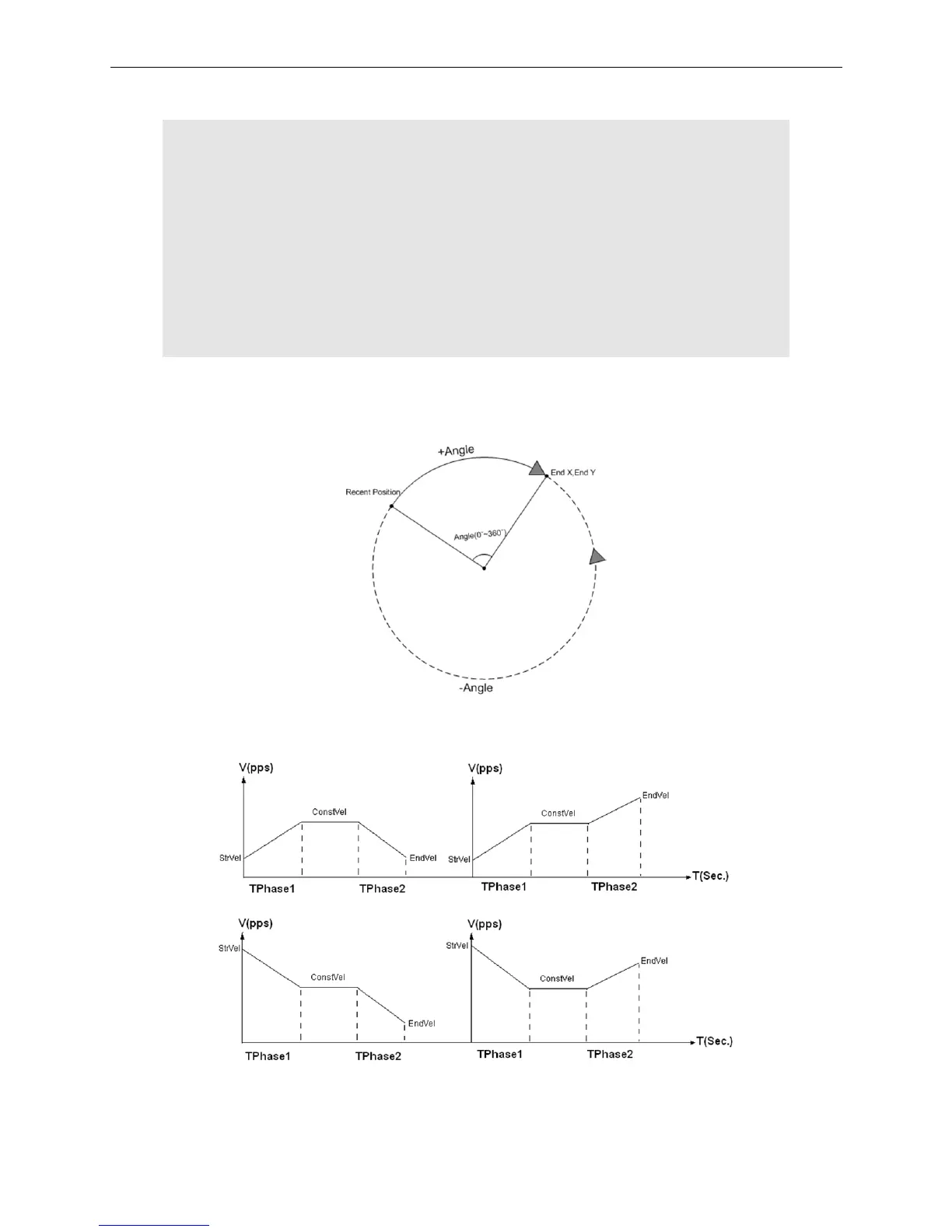
The specified angle cannot be exactly 360 degrees (or its multiple).
Figure 9.4.1 Regard the specified angle from current position as the inlucded angle and moves to the
specified end point
Figure 9.4.2 Desectipion of TPhase1 and TPhase2 (acc/deceleration)