Example for operang mode
Parameter Name Seng for this example
0x2631:001 (P400.01) Enable inverter Constant TRUE [1]
0x2631:002 (P400.02) Run Digital input 1 [11]
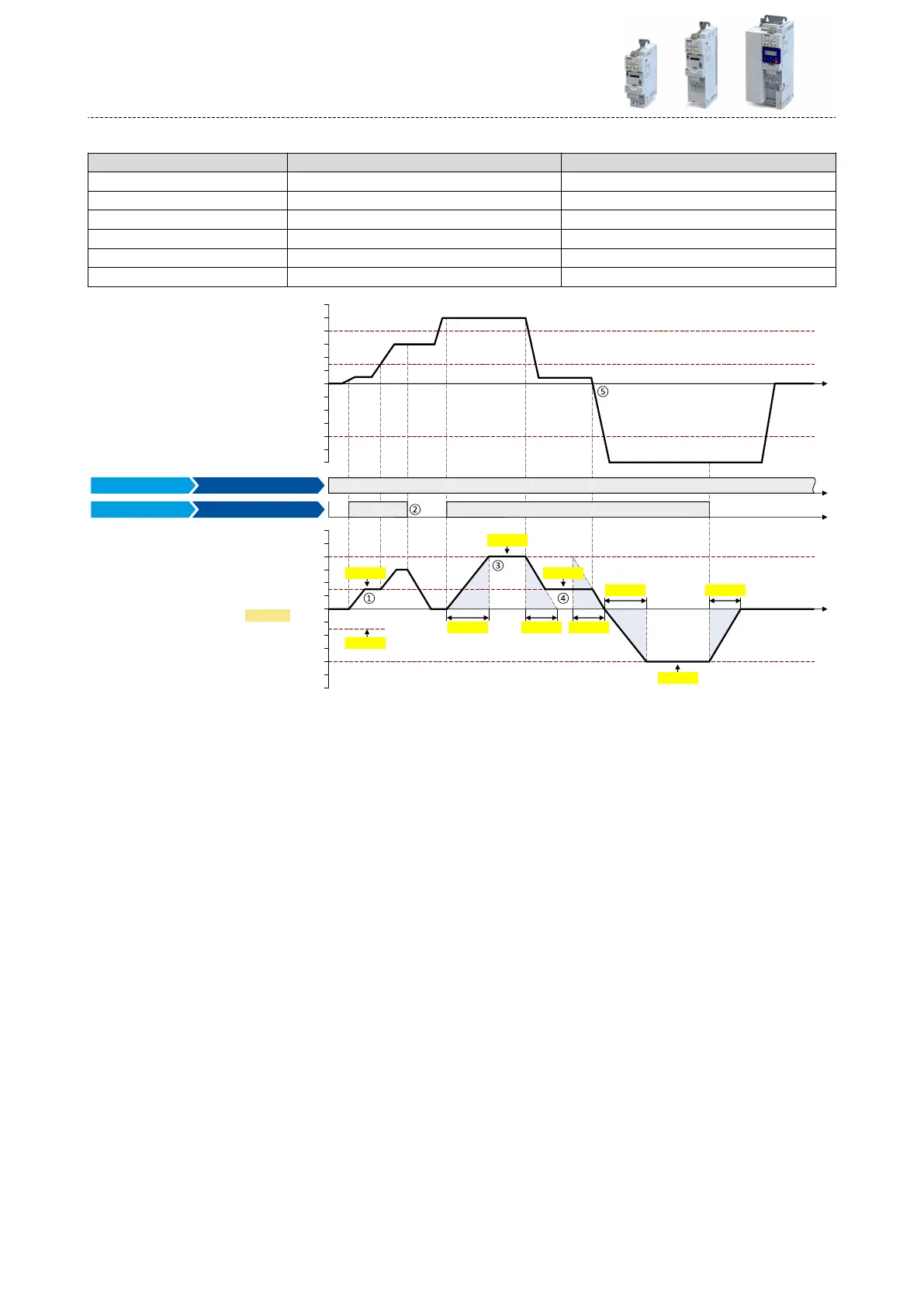
0x2915 (P210.00) Minimum frequency 15 Hz
0x2916 (P211.00) Maximum frequency 40 Hz
0x2917 (P220.00) Acceleraon me 1 4 s
0x2918 (P221.00) Deceleraon me 1 3 s
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
t
-60 Hz
-30 Hz
-50 Hz
-40 Hz
-20 Hz
-10 Hz
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
t
-60 Hz
-30 Hz
-50 Hz
-40 Hz
-20 Hz
-10 Hz
t
t
0x2916
0x2915
0x2916
0x2917 0x2918
0x2917 0x2918
0x2918
0x2915
0x2915
0x2DDD
Digital input 1 [11] Run
Constant TRUE [1] Enable inverter
FunctionTrigger
Output signals
Output frequency
Input signals
Frequency setpoint selection
①
Aer a start command, the motor is accelerated to the minimum frequency. This is also the case if the setpoint selecon is = 0 Hz. If the
setpoint exceeds the minimum frequency, the ramp generator follows the setpoint.
②
If the start command is deacvated again, the motor is stopped with the stop method set in 0x2838:003 (P203.03) (here: Standard ramp).
③
The motor is accelerated to the set maximum frequency.
④
If the setpoint falls below the minimum frequency, it is decelerated up to the minimum frequency.
⑤
In case of a sign reversal of the setpoint, a change of direcon of rotaon takes place, minimum and maximum frequency, however, con-
nue to apply.
Basic seng
Frequency limits and ramp mes
158
 Loading...
Loading...



