230 Actual signals and parameters
2304 ACC
COMPENSATI
ON
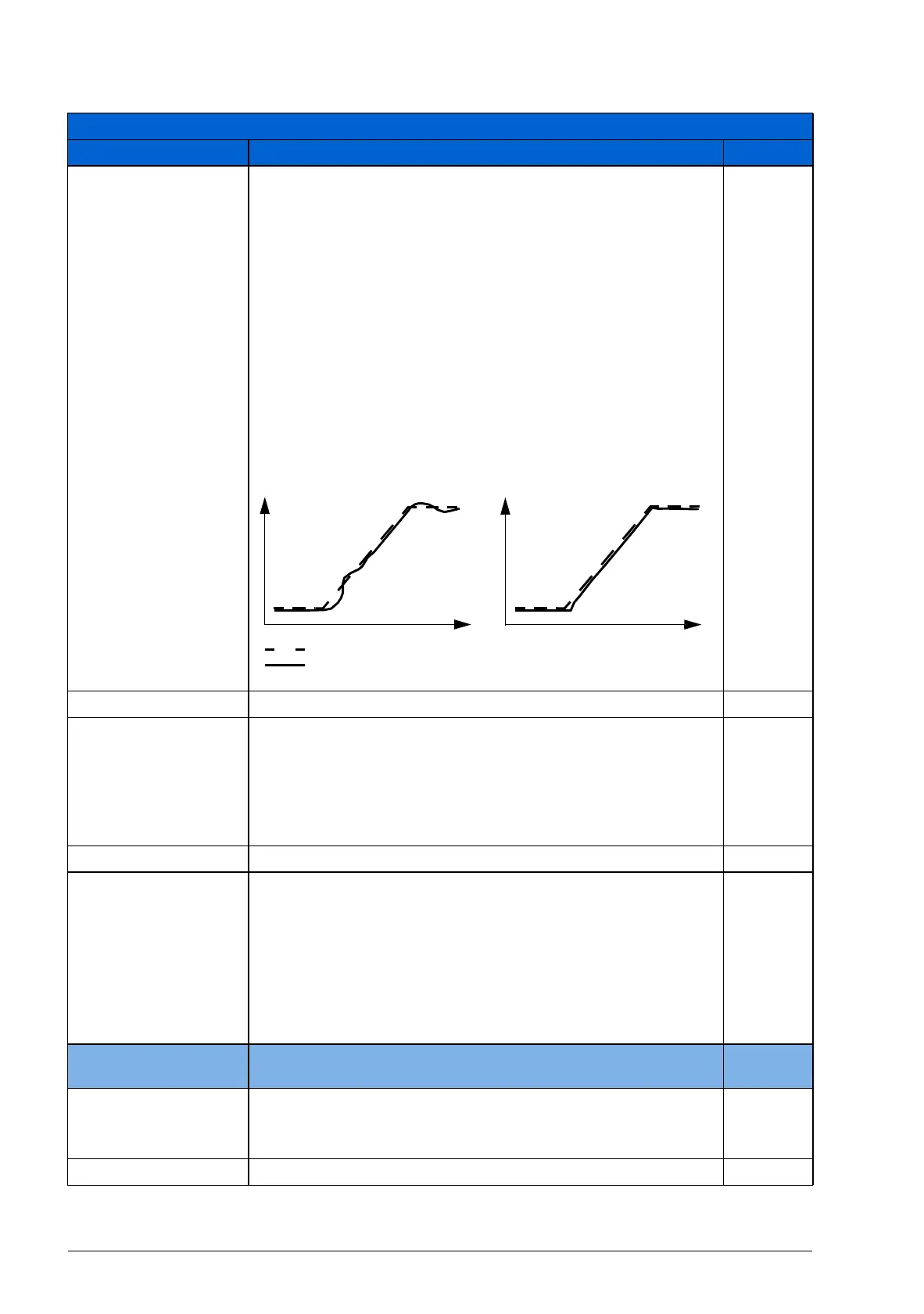
Defines the derivation time for acceleration/(deceleration)
compensation. In order to compensate inertia during
acceleration, a derivative of the reference is added to the
output of the speed controller. The principle of a derivative
action is described for parameter 2303 DERIVATION TIME.
Note: As a general rule, set this parameter to the value
between 50 and 100% of the sum of the mechanical time
constants of the motor and the driven machine. (The speed
controller Autotune run does this automatically, see
parameter 2305 AUTOTUNE RUN.)
The figure below shows the speed responses when a high
inertia load is accelerated along a ramp.
0.00 s
0.00…600.00 s Time 1 = 0.01 s
2305 AUTOTUNE
RUN
Start automatic tuning of the speed controller. Instructions:
• Run the motor at a constant speed of 20 to 40% of the
rated speed.
• Change the autotuning parameter 2305 to ON.
Note: The motor load must be connected to the motor.
OFF
OFF No autotuning 0
ON Activates the speed controller autotuning. The drive
• accelerates the motor
• calculates values for proportional gain, integration time
and acceleration compensation (parameter 2301 PROP
GAIN, 2302 INTEGRATION TIME and 2304 ACC
COMPENSATION values).
Setting is automatically reverted to OFF.
1
24 TORQUE
CONTROL
Torque control variables
2401 TORQ RAMP
UP
Defines the torque reference ramp up time, ie the minimum
time for the reference to increase from zero to the nominal
motor torque.
0.00 s
0.00…120.00 s Time 1 = 0.01 s
All parameters
No. Name/Value Description Def/FbEq
tt
No acceleration
compensation
Acceleration
compensation
Speed reference
Actual speed
% %

 Loading...
Loading...















