Actual signals and parameters 275
0 = NOT SEL
0…10000 ms
magnetizing time. If parameter value is set to zero, the
function is disabled.
1 = 1 ms
4306 RUNTIME
FREQ LVL
Defines the brake close speed. When frequency falls below
the set level during run, the brake is closed. The brake is re-
opened when the requirements set by parameters
4301…4305 are met.
0.0 =
NOT SEL
0.0 = NOT SEL
0.0…100.0%
Value in percent of the maximum frequency (in scalar
control) or the maximum speed (in vector control). If
parameter value is set to zero, the function is disabled. The
control mode is selected by parameter 9904 MOTOR CTRL
MODE.
1 = 0.1%
4307 BRK OPEN
LVL SEL
Selects the torque (in vector control) or current (in scalar
control) applied at brake release.
PAR 4302
PAR 4302 Value of parameter 4302 BRAKE OPEN LVL used. 1
MEMORY Torque value (in vector control) or current value (in scalar
control) saved in parameter 0179 BRAKE TORQUE MEM
used.
Useful in applications where initial torque is needed to
prevent unintended movement when the mechanical brake
is released.
2
50 ENCODER Encoder connection.
For more information, see MTAC-01 pulse encoder interface
module user’s manual (3AFE68591091 [English]).
5001 PULSE NR States the number of encoder pulses per one revolution. 1024 ppr
32…16384 ppr Pulse number in pulses per round (ppr) 1 = 1 ppr
5002 ENCODER
ENABLE
Enables the encoder. DISABLE
DISABLE Disabled 0
ENABLE Enabled 1
5003 ENCODER
FAULT
Defines the operation of the drive if a failure is detected in
communication between the pulse encoder and the pulse
encoder interface module, or between the module and the
drive.
FAULT
FAULT The drive trips on fault ENCODER ERR (0023). 1
ALARM The drive generates alarm ENCODER ERROR (2024). 2
5010 Z PLS ENABLE Enables the encoder zero (Z) pulse. Zero pulse is used for
position reset.
DISABLE
DISABLE Disabled 0
ENABLE Enabled 1
5011 POSITION
RESET
Enables the position reset. DISABLE
DISABLE Disabled 0
ENABLE Enabled 1
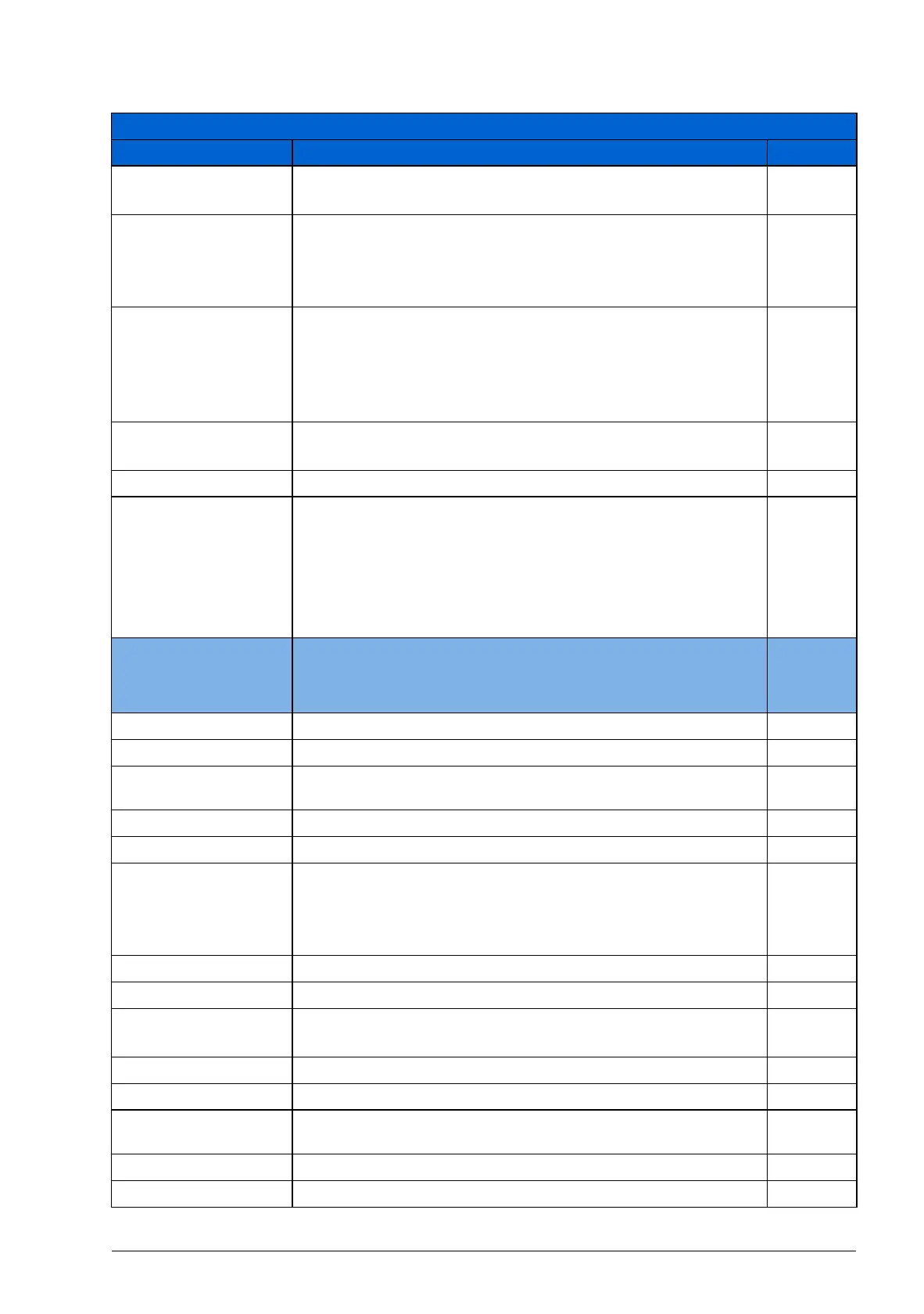
All parameters
No. Name/Value Description Def/FbEq

 Loading...
Loading...















