Creating and customising models
8.2.5 Checking and adjusting the main rotor
Secure the model when you set the rotation direction, centre, and travels for the
servos to prevent danger or damage due to unexpected reactions.
8.2.5.1 Checking / changing direction of servo rotation on the rotor head
The directions of travel for the servos must be checked and changed (if required)
before centre and travel are set.
For electric helicopters: disconnect the motor!
Move the collective pitch stick approximately to the centre position.
Then, switch the receive system ON.
Start with the Collective function!
If swashplate responds correctly when you move the collective pitch stick and if the
head servos are connected correctly, the directions of travel for aileron and elevator
must also be correct.
To perform the check move the collective pitch stick in the direction of maximum
collective pitch (climbing) and observe if the swashplate moves up and remains
horizontal.
Changing the rotation direction
1. Open the Servo main menu.
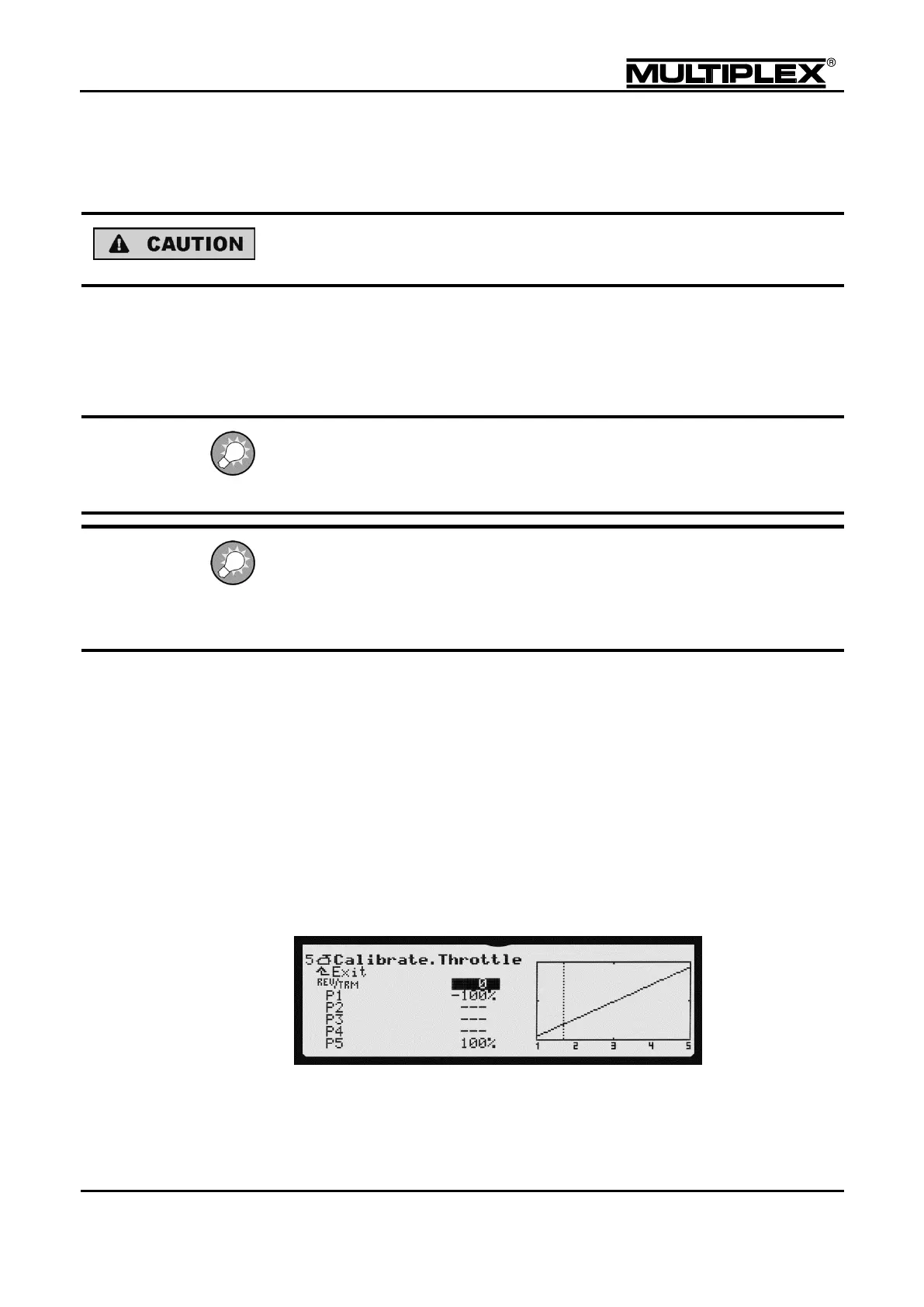
2. Open the Calibrate menu.
3. Select a servo.
4. Select REV/TRM and open the parameter.
5. Adjust the direction of servo rotation using the REV/CLR button. The effect of
the change is immediately visible in the graph (the curve reverses).

 Loading...
Loading...




