Creating and customising models
Sometimes, it can be useful to operate the throttle directly without any restrictions.
To do so, assign a switch to the CS/DTC switched function as described on
page 104. When this switch is in ON position, the limiter controls the throttle
directly.
8.2.9 Setting the collective pitch curve
Does not apply to the FUNCOPTER template! Throttle-controlled helicopters do not feature
collective pitch control.
For helicopter models, the collective pitch curve is set in the ControlFunctions
menu under Collective. For each of the flight phases a separate collective pitch
curve can be configured to achieve optimum adaptation to the respective flight
phase:
Each curve point can be allocated using the central wheel to allow in-flight configu-
ration (see section 5.4.6 "Collective (only helicopters)" on page 125).
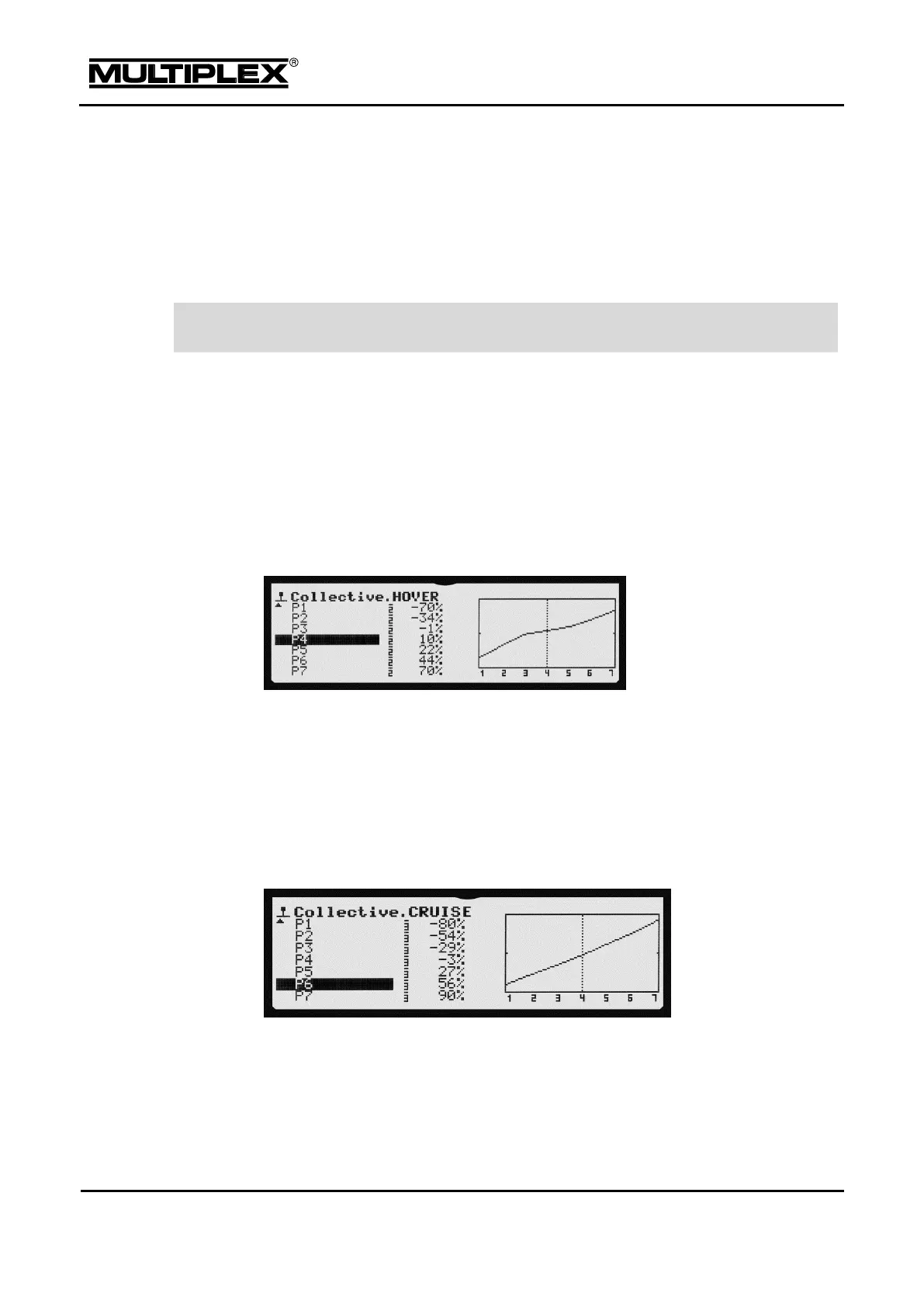
Example 1: collective pitch curve in the HOVER flight phase
A "flatter" collective pitch curve from hover collective pitch (stick centre) to
collective pitch minimum (descent) helps to provide fine control during the hover
and promote accurate landing of the model.
In the "climb" area (stick centre to collective pitch maximum) only 70% of possible
collective pitch travel is used. This also contributes to fine control during the hover.
Example 2: collective pitch curve in the CRUISE flight phase
Linear, symmetrical collective pitch curve for the same collective pitch control when
climbing and descending; overall higher maximum collective pitch values since a
higher system speed is typically set (throttle curve) allowing higher climbing
performance:

 Loading...
Loading...




