5.9 n: Special Adjustment
348 YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference
Note:
When you set this parameter to 0, the value set in n1-02 [Hunting Prevention Gain Setting] is effective when the motor rotates in reverse.
Adjust this parameter in these conditions:
• When n1-01 = 1, 2 [Hunting Prevention Selection = Enabled (Normal), Enabled (High Carrier Frequency)]: If
oscillation occurs when you operate a motor with a light load, increase the setting value in 0.1-unit increments.
• When n1-01 = 1, 2, if the motor stalls: Decrease the setting value in 0.1-unit increments.
■ n1-13: DC Bus Stabilization Control
No.
(Hex.)
Name Description
Default
(Range)
n1-13
(1B59)
Expert
DC Bus Stabilization
Control
Sets the oscillation suppression function for the DC bus voltage. 0
(0, 1)
0 : Disabled
1 : Enabled
Note:
If the DC bus voltage does not become stable with light loads and the drive detects ov [Overvoltage], set this parameter to 1.
■ n1-14: DC Bus Stabilization Time
No.
(Hex.)
Name Description
Default
(Range)
n1-14
(1B5A)
Expert
DC Bus Stabilization Time Adjusts the responsiveness of the oscillation suppression function for the DC bus voltage. Set n1-13
= 1 [DC Bus Stabilization Control = Enabled] to enable this parameter.
100.0 ms
(0.0 - 500.0 ms)
Note:
Adjust this parameter in 100 ms increments.
◆ n3: High Slip Braking (HSB) and Overexcitation Braking
n3 parameters configure High Slip Braking and Overexcitation Deceleration.
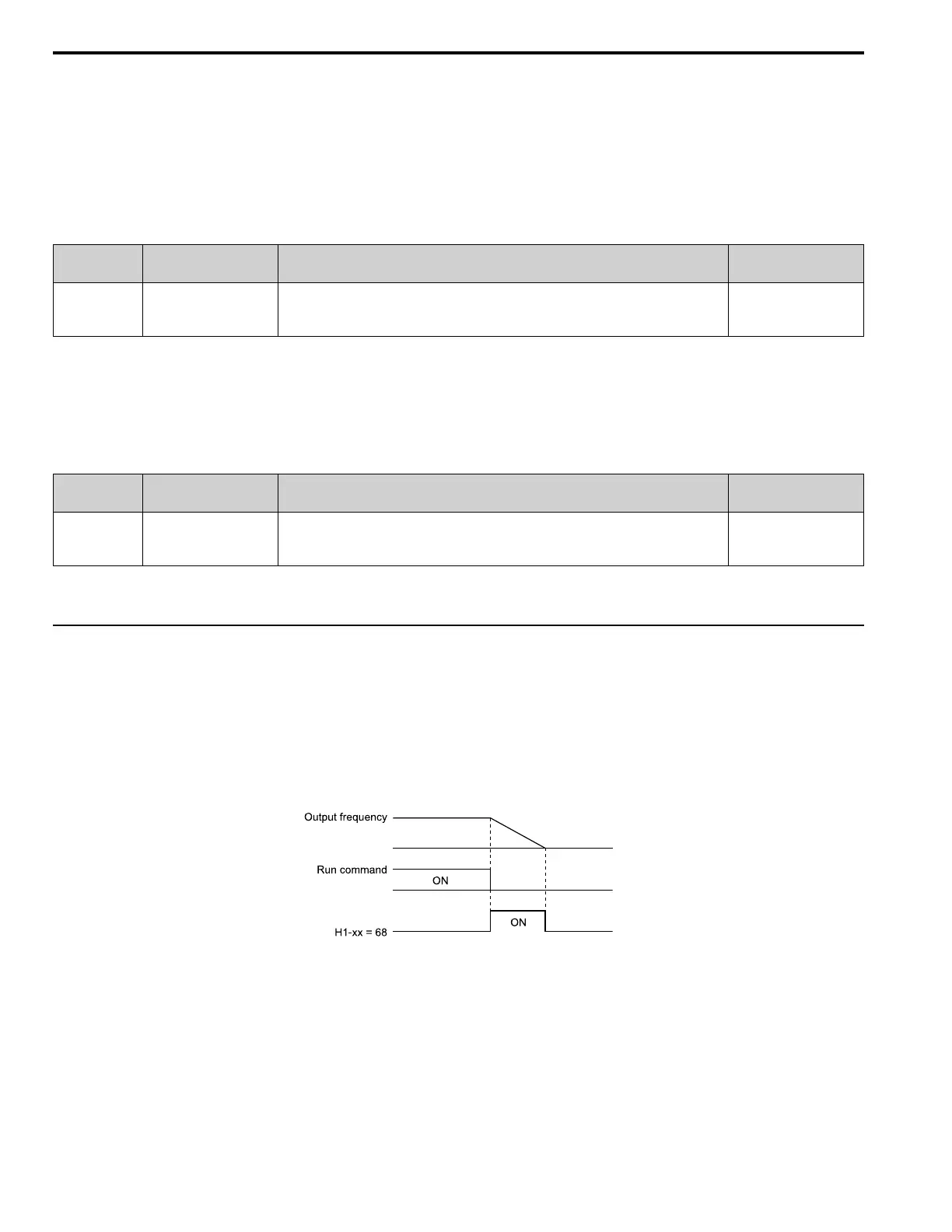
■ High Slip Braking
High slip braking quickly decelerates motors without using braking resistors.
This lets you stop a motor more quickly than with the ramp to stop processes. This function is best for applications
that do not frequently stop the motor, for example the fast stop function for high-inertia loads. High Slip Braking
starts when the MFDI for High Slip Braking (HSB) Activate [H1-xx = 68] activates.
Figure 5.89 High Slip Braking Time Chart
Principles of Operation
HSB significantly decreases the frequency supplied to the motor at the same time that deceleration starts to increase
motor slip.
The drive keeps the motor current at a constant level during deceleration to prevent overvoltage and do automatic
braking and it also keeps a slip level that causes the maximum quantity of deceleration torque.
High Slip Braking Precautions
• Do not use the high slip braking function in these applications:
 Loading...
Loading...










