Parker Hannifin
P Series User Guide 108
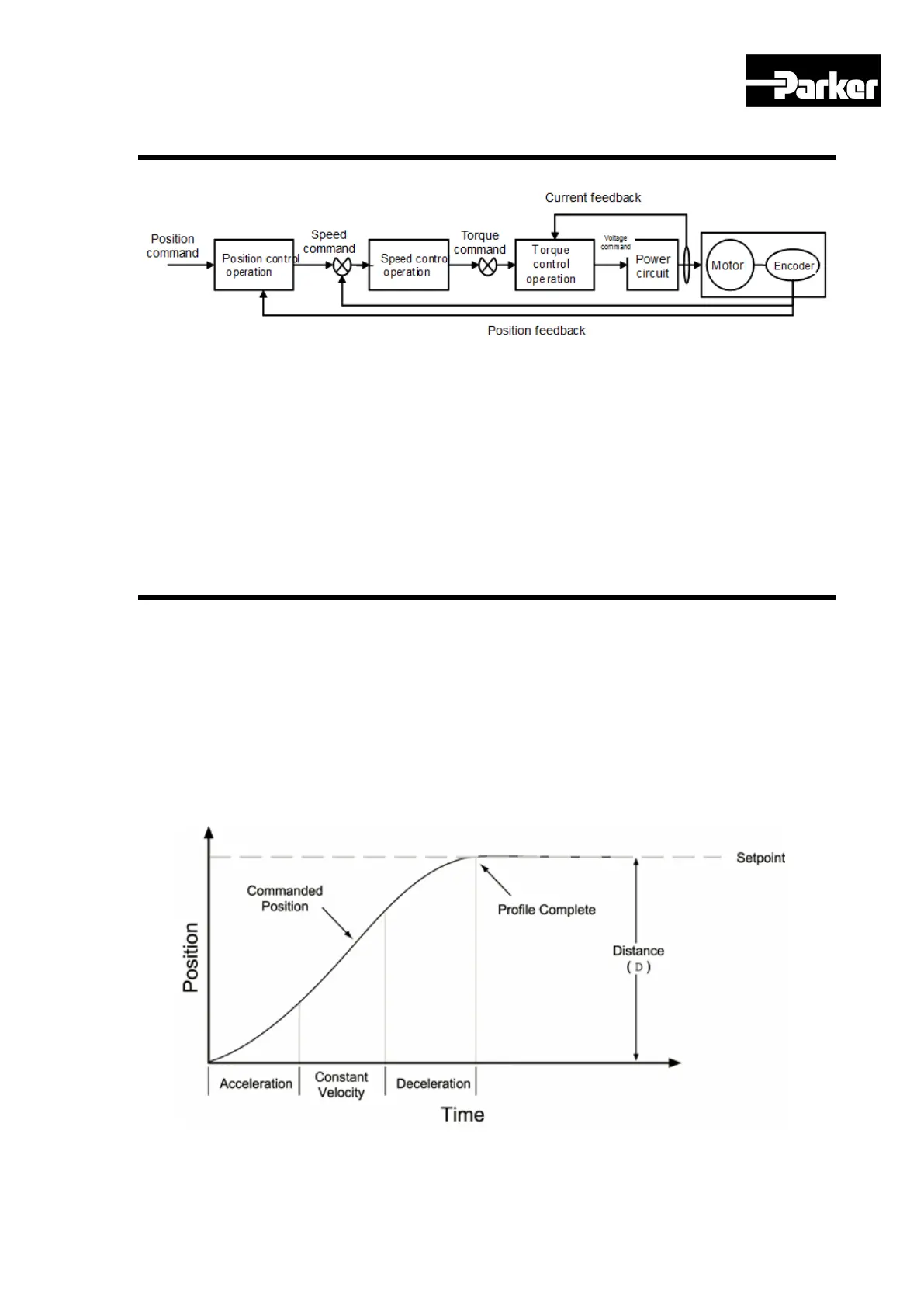
5.1 Servo Tuning Overview
You can use the drive at the torque control mode, speed control mode or position control
mode, depending on the connection method with the host device. The drive’s control
structure takes the cascade form, where the position control is positioned at the outermost
and the current control is positioned at the innermost. Depending on the drive’s operation
mode, you can tune the gain-related parameters of the torque controller, speed controller
or position controller to suit your purposes.
5.2 Position Variable Overview
In a servo system, the drive uses two types of position information:
commanded position and actual position. As these positions change with time, you can use
the position values to determine if the system is positioning as you expect.
5.2.1 Commanded Position
The commanded position is calculated by the motion profile routine from the controller and
it is updated every servo sampling period. Therefore, the commanded position is the
intended position at any given point of time.
To view the commanded position, use the drive support tool. (drive setup software)
Figure 30. Commanded Position

 Loading...
Loading...







