Parker Hannifin
P Series User Guide 83
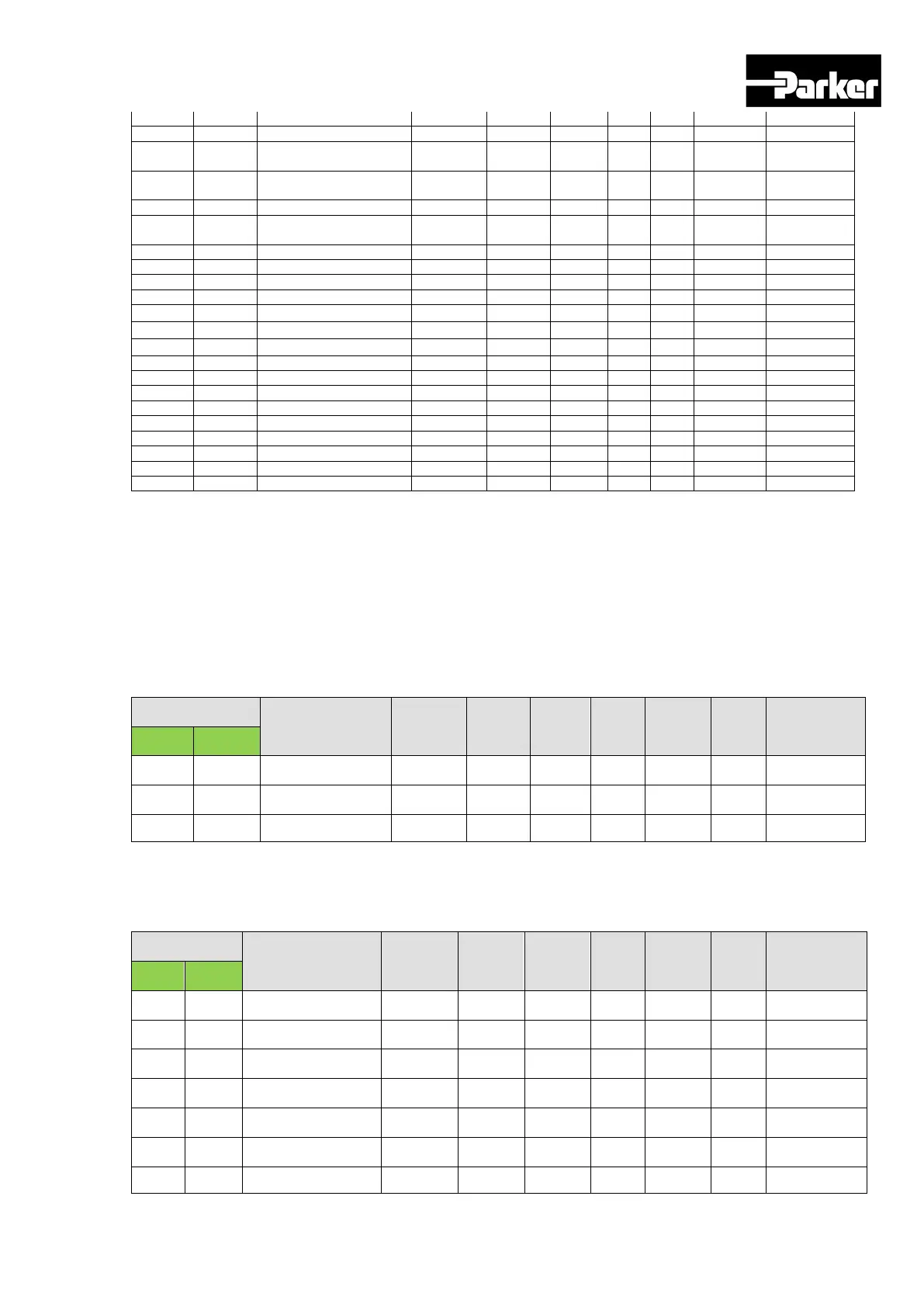
9732 0x2604
Accumulated Operation
Overload
0x2603 INT - - - 0.10% RO
9733 0x2605
Instantaneous Maximum
Operation Overload
0x2604 INT - - - 0.10% RO
9735 0x2607
Accumulated
Regeneration Overload
0x2606 INT - - - 0.10% RO
℃
℃
℃
Table 41. Monitoring Parameters
4.3.8 Procedures and Alarm History
parameter name
parameter
No.
Variable
Format
Default
Value
Min Max Unit Accessibility
decimal
9984 0x2700
0x2700 UINT 0 0 0xFFFF - RW
9985 0x2701
Procedure
Command Argument
0x2701 UINT 0 0 0xFFFF - RW
9986 0x2702 Servo Alarm History 0x2702 STRING - - - - RO
Table 42. Procedures and Alarm History
4.3.9 3
rd
Party Motor Parameters
parameter name
parameter
No.
Variable
Format
Default
Value
Min Max Unit Accessibility
10240 0x2800
0x2800 UINT 0 0 1 - RW
10241 0x2801
[Third Party Motor]
Number of Poles
0x2801 UINT 8 2 1000 - RW
10242 0x2802
[Third Party Motor]
Rated Current
0x2802 FP32 2.89 - - Arms RW
10244 0x2804
[Third Party Motor]
Maximum Current
0x2803 FP32 8.67 - - Arms RW
10246 0x2806
[Third Party Motor]
Rated Speed
0x2804 UINT 3000 1 60000 rpm RW
10247 0x2807
[Third Party Motor]
Maximum Speed
0x2805 UINT 5000 1 60000 rpm RW
10248 0x2808 [Third Party Motor] 0x2806 FP32 0.321 - - Kg RW

 Loading...
Loading...







