Parker Hannifin
P Series User Guide 124
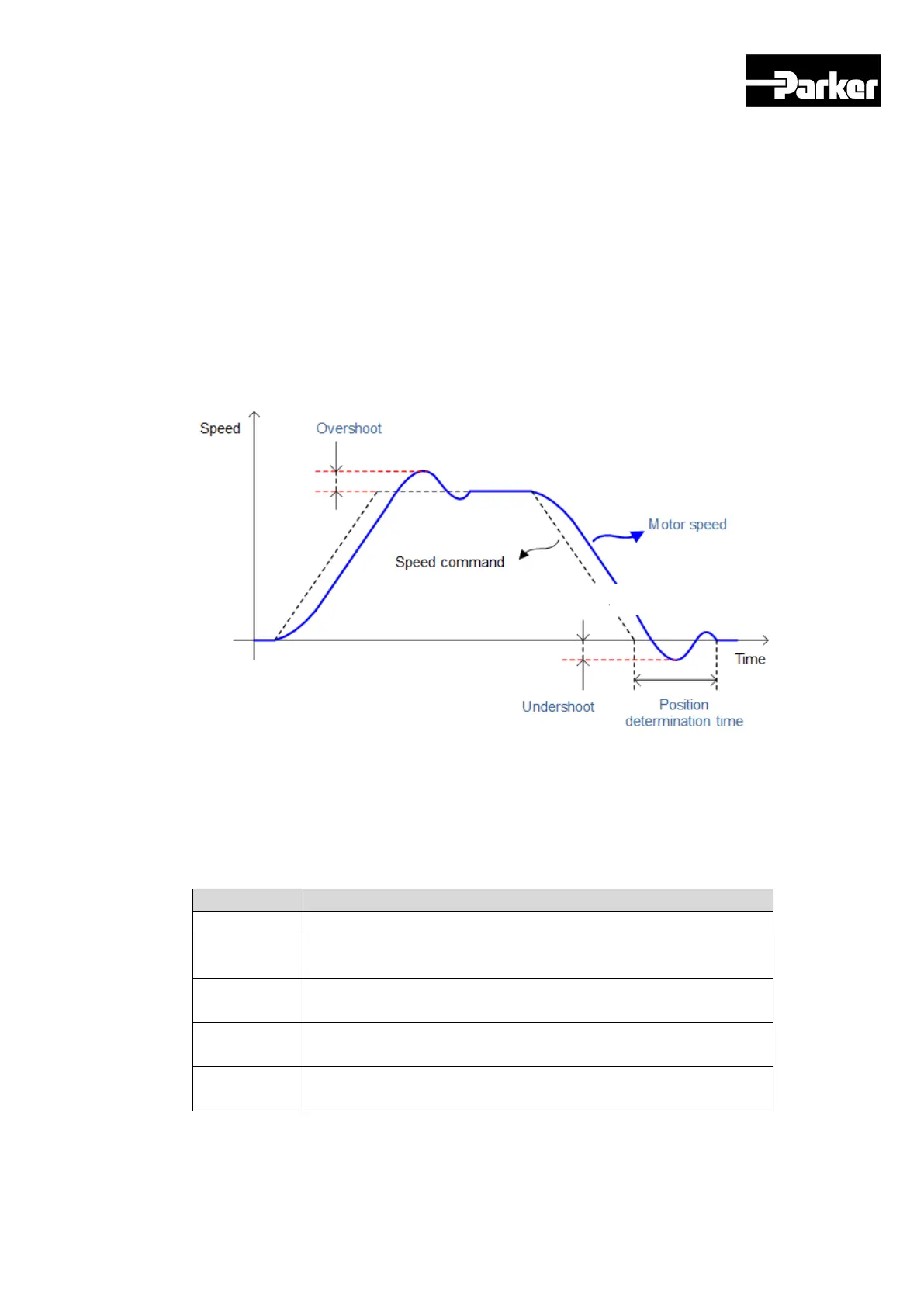
PI/P control conversion function involves converting between PI control and P
control, based on the parameter conditions inside the servo (torque, speed,
acceleration, position difference).
Speed control: to inhibit overshoot / undershoot during acceleration/deceleration
Position control: to reduce position determination time by inhibiting undershoot
during determination action.
Similar effect can be achieved by acceleration/deceleration setting at the host
device, soft start setting of the servo drive, and position command filter, etc.
Figure 39. P/PI Control Conversion
You can set this function by P/PI control conversion mode (0x2114). Please see the
explanation below. Conversion to P control by PCON input is given priority over the
set value herein.
1
Convert to P control when the command torque is over the P
control switch torque(0x2115)
2
Convert to P control when the command speed is over the P
control switch speed(0x2116)
3
Convert to P control when the acceleration command is over the
P control switch speed(0x2117)
4
Convert to P control when the following error is over the P control
switch following error(0x2117)
Time
Undershoot
Position
determination time

 Loading...
Loading...







