Parker Hannifin
P Series User Guide 113
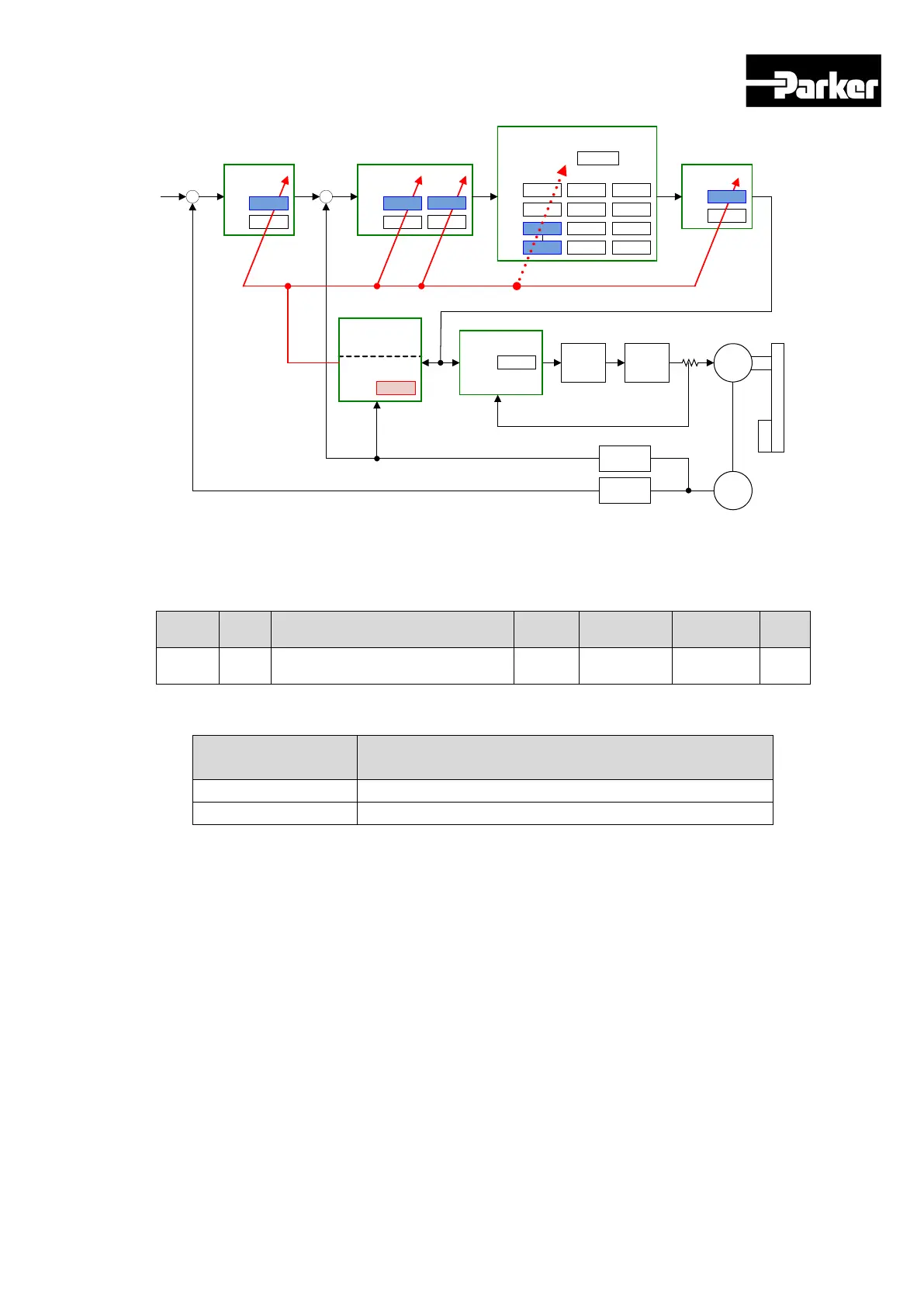
Notch Filter
3
4
0x2508
0x250B
0x2501
0x2504
1
2
0x2502
0x2505
0x2509
0x250C
0x2503
0x2506
Fr equency Width Depth
0x2500
Adapti ve Fil ter
funct ion Select
Tor que Fil ter
Time
0x2108
1
2
Velocity Contr ol
0x2106
1
2
0x2107
P Gai n I Gai n
-
+
Position Contr ol
0x2105
1
2
P Gai n
-
+
Motor
Load
Encoder
Space
Vector
Contr ol
Current Control
0x2514Gai n
PWM
Contr ol
Load I ner ti a
Estimation
0x2100Iner t ia
Resonance
Fr equency
Estimation
Ref.
Veloci ty
Calculation
Veloci ty
Calculation
Veloci ty Feedback
Cur r ent Feedback
Position Feedback
0x2507
0x250A
0x2104
0x2102
0x2103
0x2101
Tor que Command
5.5.2 On-line auto tuning object
Index
Index
Name
Format
Accessibility
Allowcation
Unit
0x250D
- (On-line Gain Tuning Mode ) UINT RW No -
Predetermined
(C) Setting detail
(E) Gain real-time tuning OFF
(G) Gain real-time tuning ON
The default setting is 0. When you’re not available to do on-line auto tuning or you already
know the gain value, please set the value to 0.
If you set the value to 1, it performs an online auto-tuning.
Please select it when variation of load inertia is small or you don’t know inertia ratio.
Estimated value of gain is stored in EEPROM roughly every two minutes during on-line
auto tuning.

 Loading...
Loading...







