Parker Hannifin
P Series User Guide 168
6.12 Touch Probe Function
Touch probe captures the encoder’s position value using external input(PROBE1,2) signals or the
Index(Z) pulse of the encoder.
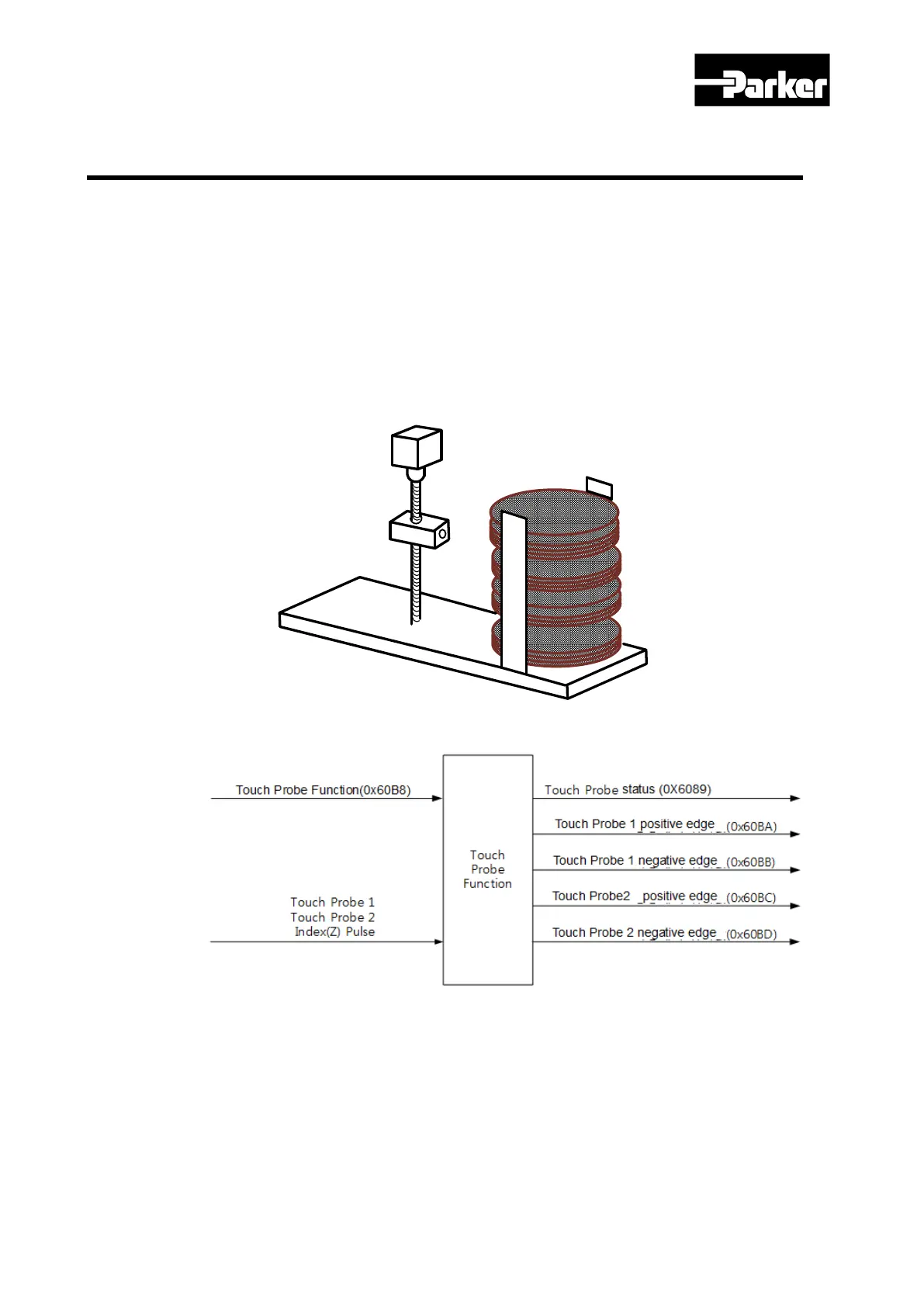
Example of using touch probe
Water Mapper System of WTR (Wafer transfer robot)
When multiple layers of waters are loaded on the Wafer Stack, the sensor determines the
existence of waters through a single scan. Using the water load position value, the robot’s
unnecessary movements can be minimized
Figure 52. Touch Probe Function
The position value of the encoder (Position Actual Value, 0x6064) are latched by the following
trigger events depending on the set value. In case of simultaneous input through 2 channels, the
values can be separately latched at each of the positive/negative edges.
Trigger by touch probe 1(I/O, PROBE1)
Trigger by touch probe 2(I/O, PROBE2)

 Loading...
Loading...







