Parker Hannifin
P Series User Guide 122
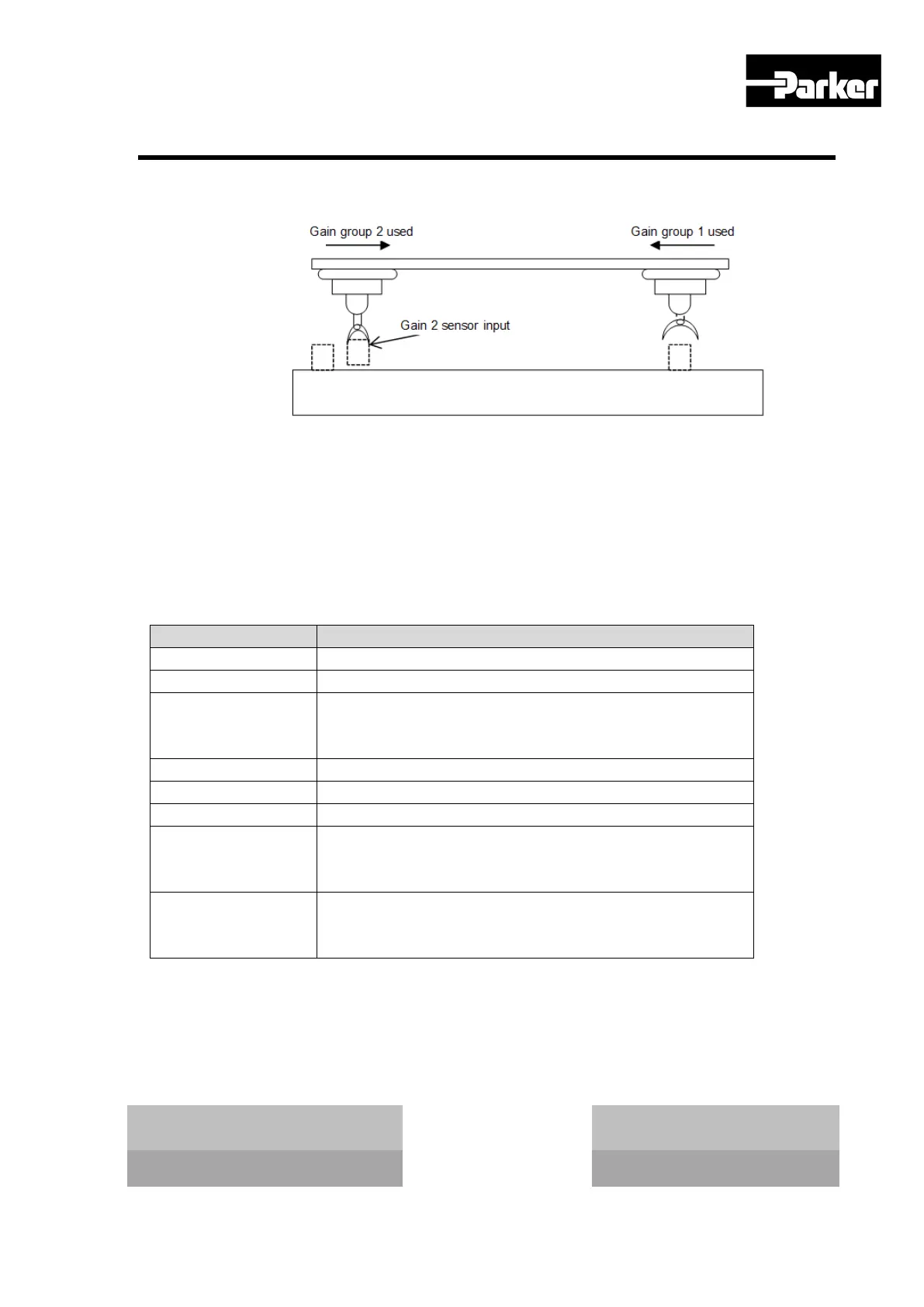
5.10.1 Gain Group Conversion
This function is one of the methods to adjust gains: you can convert gain group 1
and gain group 2. Through such conversion, you can reduce the time required for
position determination.
Gain group consists of position loop gain / speed loop gain / speed loop integral
time constant / torque command filter time constant: you can set the gain
conversion function (0x2119) as follows.
Gain conversion (0x2119) descriptions
2
Gain conversion based on GAIN2 input status
- 0:use gain group 1
6
Gain conversion based on ZSPD output status
- 0:use gain group 1
7
Gain conversion based on INPOS1output status
- 0:use gain group 1
Table 69. Gain Conversion Description
The waiting time and conversion time during gain conversion are as follows.
Gain group 1 Gain conversion time
1(0x211A)
Gain group2
Position loop gain1(0x2101)
Speed loop gain1(0x2102)
Position loop gain2(0x2105)
Speed loop gain2(0x2106)

 Loading...
Loading...







