Parker Hannifin
P Series User Guide 157
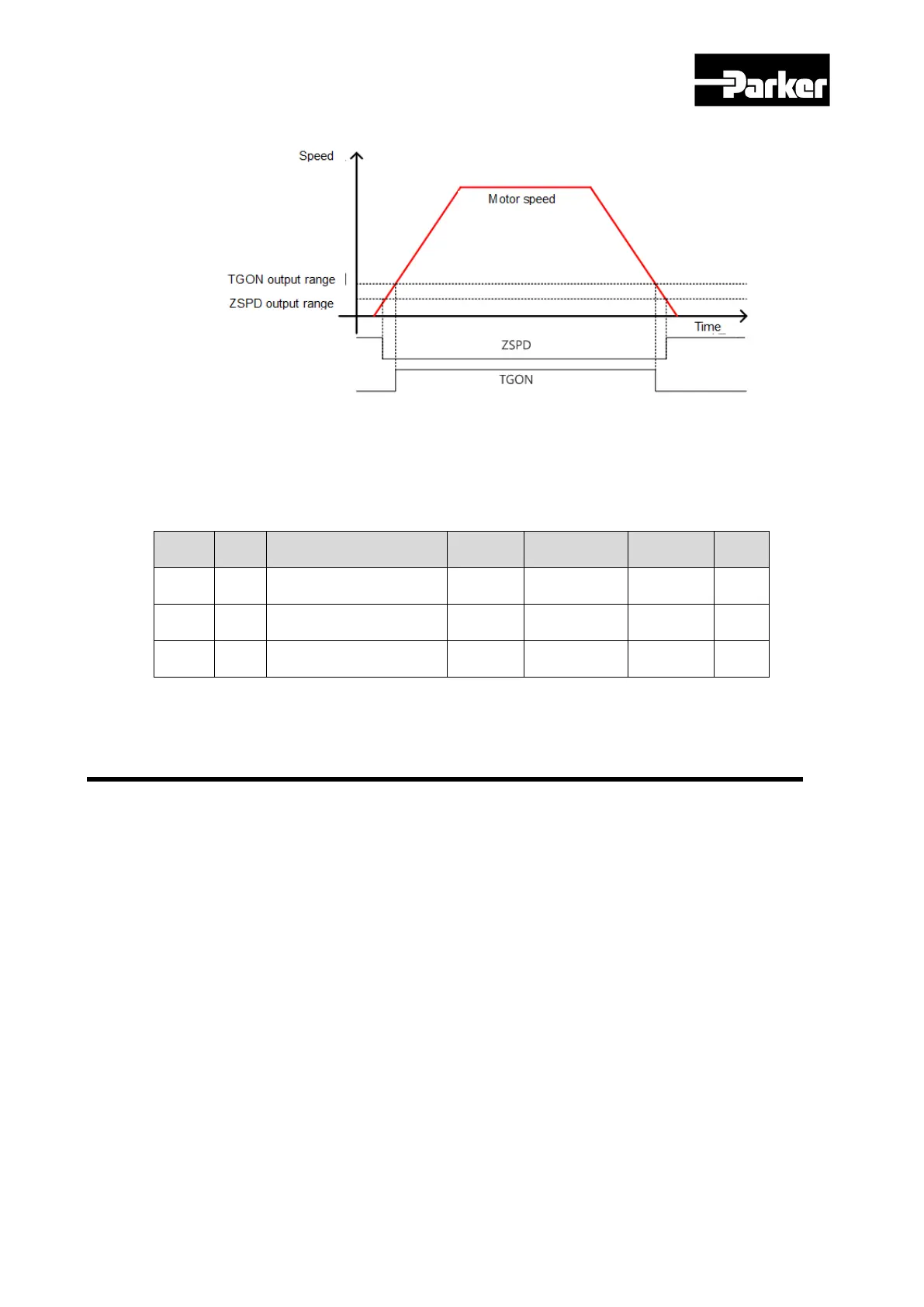
And when the difference between the command and the speed feedback, that is, the speed
error is within the INSPD output range (0x2406), the INSPD(speed match) signal is
displayed.
Related Objects
Index
Name
Accessibility
Unit
0x2404
- ZSPD Output Range UINT RW Yes rpm
0x2405
- TGON Output Range UINT RW Yes rpm
0x2406
- INSPD Output Range UINT RW Yes rpm
Table 82. Servo Lock Function Related Objects
6.9 Position Control Setting
6.9.1 Position Command Filter
You can apply filters to position command to achieve smoother operation. For such filtering,
you can set the position command filter time constant using the primary low pass filter
(0x2109) and the position command average filter time constant using movement average
(0x210A).
Position command filter can be used in the following cases.
(1) Cases where the electronic gear ratio is 10 times or higher
(2) Cases where the host device cannot create acceleration/deceleration profile.

 Loading...
Loading...







