Parker Hannifin
P Series User Guide 80
8723 0x2213
Digital Output Signal 4
Selection
0x2213 UINT
0 0xFFFF - RW
8724 0x2214
Digital Output Signal 5
Selection
0x2214 UINT
0 0xFFFF - RW
8725 0x2215
Digital Output Signal 6
Selection
0x2215 UINT
0 0xFFFF - RW
8726 0x2216
Digital Output Signal 7
Selection
0x2216 UINT
0 0xFFFF - RW
8727 0x2217
Digital Output Signal 8
Selection
0x2217 UINT
0 0xFFFF - RW
8728 0x2218
Analog Torque
Input(command/limit) Scale
0x221C UINT 100 0 0xFFFF
RW
8729 0x2219
Analog Torque
Input(command/limit) Offset
0x221D INT 0 -1000 1000 mV RW
8730 0x221A
Analog Velocity Override
Mode
0x221E UINT 0 0 1 - RW
8731 0x221B
Input(command/override)
0x221F INT 0 -1000 1000 mV RW
8732 0x221C
Analog Monitor Output
Mode
0x2220 UINT 0 0 1 - RW
8733 0x221D
Analog Monitor Channel 1
Select
0x2221 UINT 0 0 65535 - RW
8734 0x221E
Analog Monitor Channel 2
Select
0x2222 UINT 1 0 65535 - RW
8736 0x2220
Analog Monitor Channel 1
Offset
0x2223 DINT 0 0
- RW
8738 0x2222
Analog Monitor Channel 2
Offset
0x2224 DINT 0 0
- RW
8740 0x2224
Analog Monitor Channel 1
Scale
0x2225
500 0
- RW
8742 0x2226
Analog Monitor Channel 2
Scale
0x2226
500 0
- RW
8744 0x2228
Analog Velocity Command
Filter Time Constant
0x2227 UINT 2 0 1000 - RW
8745 0x2229
Analog Torque Command
Filter Time Constant
0x2228 UINT 2 0 1000 - RW
8746 0x222A
Analog Velocity Command
Scale
0x2229 INT 100 0 1000 - RW
8747 0x222B
Analog Velocity Command
Clamp Level
0x222A UINT 0 0 100 - RW
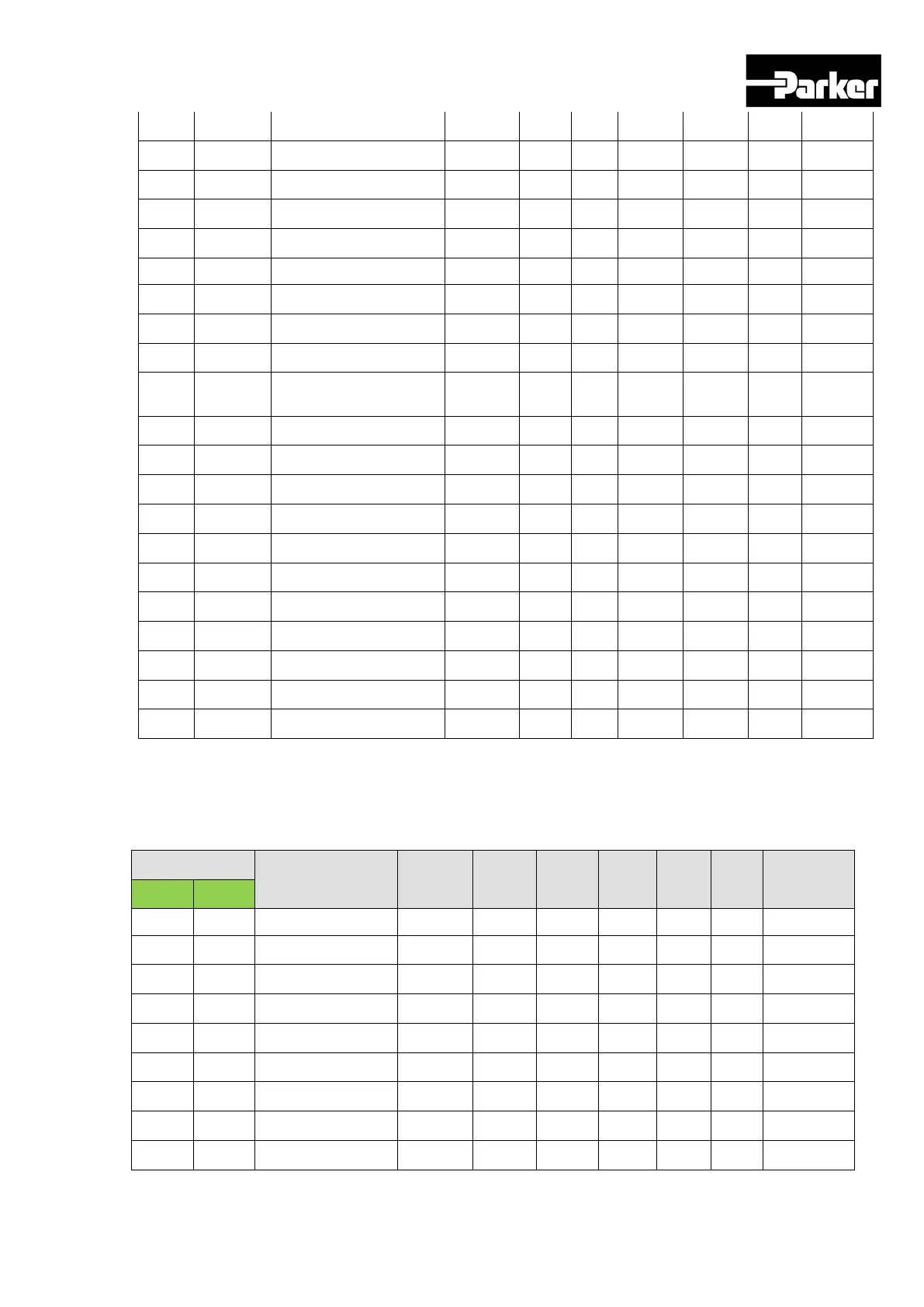
Table 37. I/O Parameters
4.3.4 Speed Operation Parameters
parameter name
parameter
No.
Variable
Format
Default
Value
Min Max Unit Accessibility
decimal
8960 0x2300 Jog Operation Speed 0x2300 INT 500 -6000 6000 rpm RW
8961 0x2301
Speed Command
Acceleration Time
0x2301 UINT 200 0 10000 ms RW
8962 0x2302
Speed Command
Deceleration Time
0x2302 UINT 200 0 10000 ms RW
8963 0x2303
Speed Command S-
curve Time
0x2303 UINT 0 0 1000 ms RW
8964 0x2304
Program Jog
Operation Speed 1
0x2304 INT 0 -6000 6000 rpm RW
8965 0x2305
Program Jog
Operation Speed 2
0x2305 INT 500 -6000 6000 rpm RW
8966 0x2306
Program Jog
Operation Speed 3
0x2306 INT 0 -6000 6000 rpm RW
8967 0x2307
Program Jog
Operation Speed 4
0x2307 INT -500 -6000 6000 rpm RW
8968 0x2308
Program Jog
Operation Time 1
0x2308 UINT 500 0 10000 ms RW

 Loading...
Loading...







