Parker Hannifin
P Series User Guide 141
7,8,9,10
During forward operation, the motor is returned to origin by homing switch (POT) and
index (Z) pulse. While returning to origin, when positive limit switch (POT) is input, the
11,12,13,
14
During reverse operation, the motor is returned to origin by homing switch (POT) and
index (Z) pulse. While returning to origin, when negative limit switch (NOT) is input, the
24
During forward operation, the motor is returned to origin by homing switch (POT). While
returning to origin, when positive limit switch (POT) is input, the direction changes.
28
During reverse operation, the motor is returned to origin by homing switch (POT). While
returning to origin, when negative limit switch (NOT) is input, the direction changes.
33 During reverse operation, the motor is returned to origin by index (Z) pulse.
34 During forward operation, the motor is returned to origin by index (Z) pulse.
35 The current position is set as origin.
-1
During reverse operation, the motor is returned to the origin by reverse stopper and
index (Z) pulse.
-2
During forward operation, the motor is returned to the origin by forward stopper and
index (Z) pulse.
-3 During reverse operation, the motor is returned to the origin by reverse stopper
During forward operation, the motor is returned to origin by forward stopper
Table 78. Homing Methods
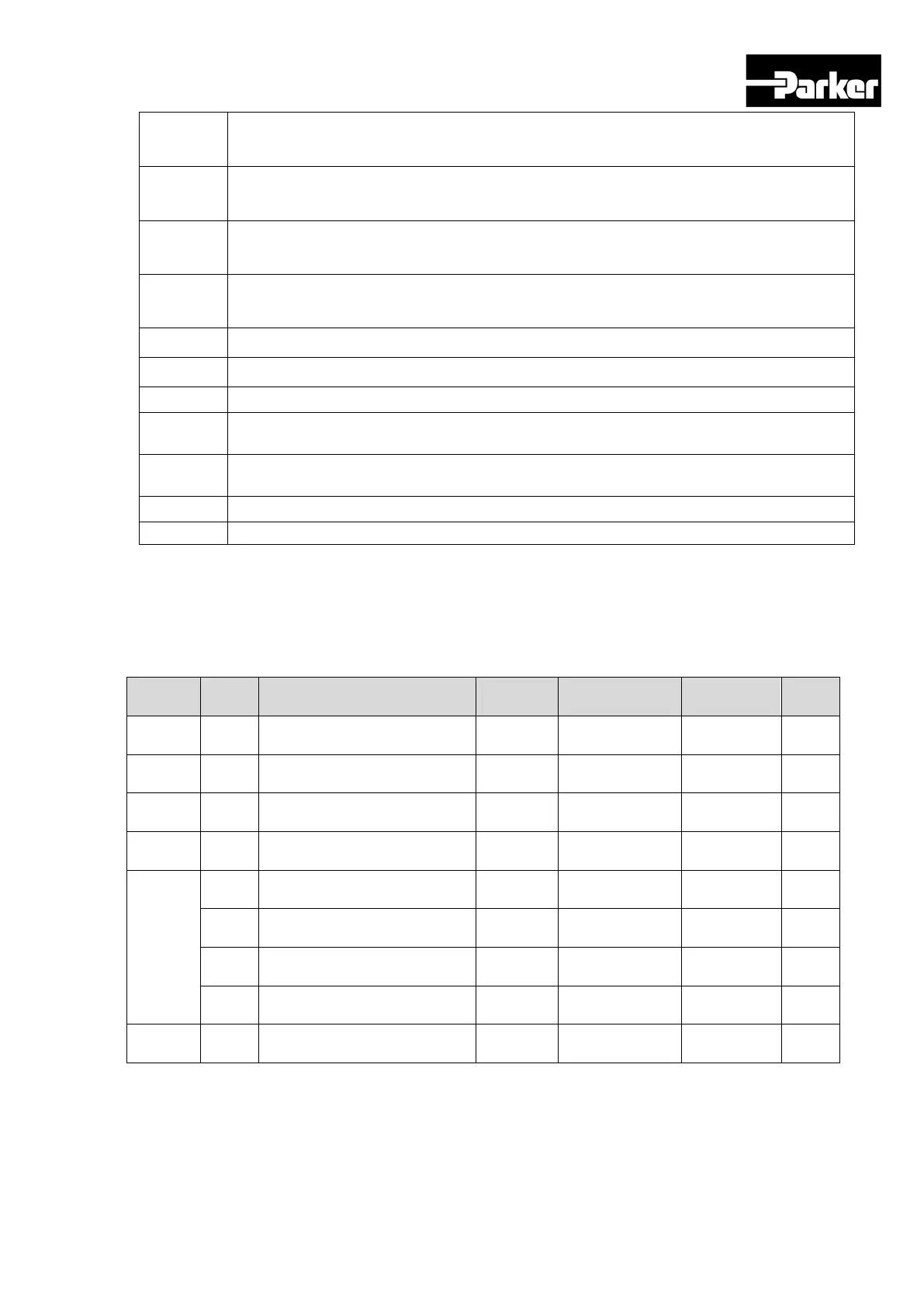
6.6.2 Related Objects
Index
Name
Accessibility
Unit
0x6040 - Control word UINT RW Yes -
0x6041 - Status word UINT RO Yes -
0x607C - Home Offset DINT RW No UU
0x6098 - Homing Method SINT RW Yes -
0x6099
- Homing speed - - - -
0 Number of entries USINT RO No -
1
Speed during search for
switch
UDINT RW Yes UU/s
2 Speed during search for zero UDINT RW Yes UU/s
0x609A - Homing Acceleration UDINT RW Yes UU/s
2
Table 79. Homing Related Objects

 Loading...
Loading...







