Parker Hannifin
P Series User Guide 74
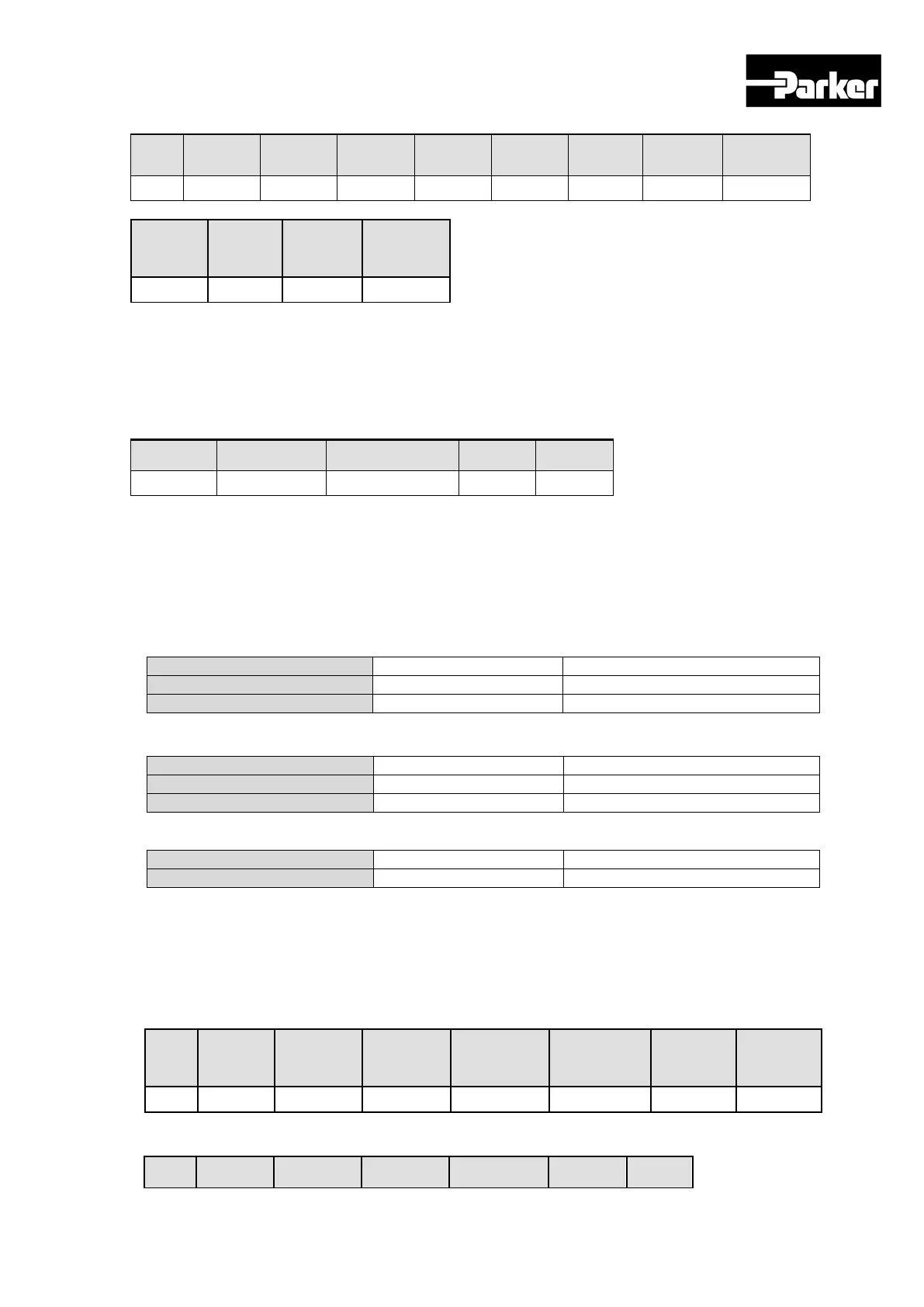
Request OK
Node
ID
Function
Byte
Count
Register
Value Hi
Register
Value Lo
Register
Value Hi
Register
Value Lo
Register
Value Hi
Register
Value Lo
0x01 0x03 0x08 0x00 0x0D 0x00 0x02 0x00 0x00
Register
Value Hi
Register
Value
Lo
CRC Hi CRC Lo
0x00 0x08 0x31 0X11
- motor ID (Address: 0x2000) value reads 13(or 0x000D), and Encoder type (Address:
0x2001) value reads 2(or 0x0002). Number of encoder pulses per rotation (Address:
0x2002~0x2003) is a 32bit data, so the data must be swapped once read. Thus, the
currently displayed value 524288 (or 0x00080000).
Response not OK
Node ID Error Code Exception Code CRC Hi CRC Lo
0x01 0x83 0x01 ~ 0x06 - -
Table 28. Example of Reading Multiple Parameters
D. Read Input Register (0x04)
Read binary values of single register (16bit data) and continuous register (16bit data unit).
Request
Request OK
*N = Quantity of Input Registers
Response not OK
Table 29. Read Input Signal
Example1) Reading the parameter value of Drive Status Output 1(Address: 0x2121)
Request
Node
ID
Function
Starting
Address
Hi
Starting
Address
Lo
Quantity of
Register Hi.
Quantity of
Register Lo
CRC Hi CRC Lo
0x01 0x04 0x21 0x21 0x00 0x01 0x6B 0xFC
Request OK
Node
Function
Byte Register Register
CRC Hi
CRC

 Loading...
Loading...







